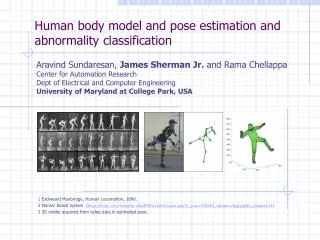
An Efficient Branch-and-Bound Algorithm for Optimal Human Pose Estimation
An Efficient Branch-and-Bound Algorithm for Optimal Human Pose Estimation. OUTLINE. Introduction The Human Pose Estimation MRF Branch and bound Experiments Conclusion. Introduction. Introduction. Simple representations(like tree or star models) can be efficiently applied

An Efficient Branch-and-Bound Algorithm for Optimal Human Pose Estimation
E N D
Presentation Transcript
An Efficient Branch-and-Bound Algorithm for Optimal Human Pose Estimation
OUTLINE • Introduction • The Human Pose Estimation • MRF • Branch and bound • Experiments • Conclusion
Introduction • Simple representations(like tree or star models) can be efficiently applied • Misclassification errors • Models with rich representations (i.e., loopy graphical models) are theoretically more robust • Time complexity may increase dramatically
Introduction • Propose an efficient and exact inference algorithm • Based on branch-and-bound • Solving MAP inference on general MRF • Contribution • Relaxing the loopy model into a mixture of star-models • A special data structure (BMT) and an efficient search routine(OBMS)
OUTLINE • Introduction • The Human Pose Estimation • MRF • Branch and bound • Experiments • Conclusion
MRF in loopy model • Equivalent to the Maximum a Posteriori(MAP) inference problem • finds the best assignment • 1
OUTLINE • Introduction • The Human Pose Estimation • MRF • Branch and bound • Experiments • Conclusion
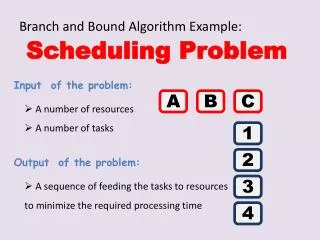
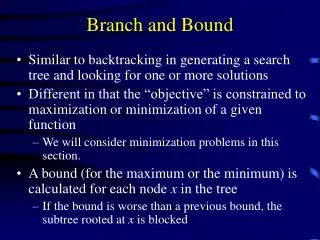
Branch and bound • The MAP inference problem is hard • The hypothesis space is large • DP work well on tree models • Can’t be applied due to the complicated pair-wise relationships • Use the likelihood do branch into two subspace • The upper bound of the value of the MAP assignment is used as “the likelihood”
OUTLINE • Introduction • The Human Pose Estimation • MRF • Branch and bound • Experiments • Conclusion
Experiments • This analysis using the Stretchable Models (SM) • Device • 64-bit 16-Core Intel(R) • Xeon(R) 2.40GHz CPU • 48GB RAM • Algorithm • C++ • Matlab
Experiments • Buffy • X: Our method • Y: CP method • Green: Without OBMS • Red: Full BB approach
OUTLINE • Introduction • The Human Pose Estimation • MRF • Branch and bound • Experiments • Conclusion
Conclusion • Shown that our efficient and exact inference algorithm • An interesting future research direction • Learning parameters of complex models to achieve accurate performance • Source Codes