Download
1 / 24
280 likes | 600 Views
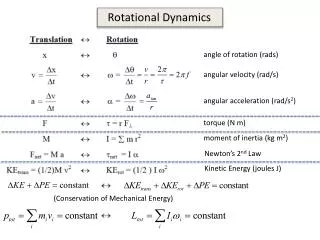
Rotational Dynamics. Just as the description of rotary motion is analogous to translational motion, the causes of angular motion are analogous to the causes of translational motion:. Newton’s Second Law. Translational Motion F = ma.

E N D
Rotational Dynamics Just as the description of rotary motion is analogous to translational motion, the causes of angular motion are analogous to the causes of translational motion: Newton’s Second Law Translational Motion F = ma This relationship is true, but it disregards the location of the force on the body!
Accounting for not only the force but also its location on the object is torque! • A torque is a twist as a force is a push or pull Torque is the vector cross product of the displacement of the force with respect to an arbitrary origin and the force that’s acting. = r x F units: N• m The magnitude of torque can be found: ø is smallest angle between r and F when tail to tail = rFsinø
= rFsinø ø r The direction of torque will be found as any vector cross product (right hand rule). M F As viewed from above– counterclockwise (out of board) is negative clockwise (into board) is positive
Find the resultant net torque if: F1 = 4.20 N, r1 = 1.30 m, ø1 = 75.0˚ F2 = 4.90 N, r2 = 2.15 m, ø2 = 58.0˚ τ = τ1 – τ2
Vector Cross Product- unit vector notation A = (Axi + Ayj + Azk) B = (Bxi + Byj + Bzk) To find A X B use a determinant: i j k Ax Ay Az Ax Ay Az Ax Ay Az Bx By Bz Bx By Bz Bx By Bz A X B = (AyBz – AzBy)i + (AzBx – AxBz)j + (AxBy – AyBx)k
Torque and Moment of Inertia A net force is directly proportional to inertia and acceleration: ΣF = ma An object does not want to change its rotational motion any more than its translational motion! A net torque is directly proportional to rotational inertia and angular acceleration. • this resistance to angular acceleration is known as moment of inertia (I ) with units: kg-m2 Net Torque would then be a product of the rotational inertia and angular acceleration of an object: Στ = Iα
The pulley shown in the illustration has a radius of 2.70 m and a moment of inertia of 39.0 kg∙m2. The hanging mass is 4.20 kg and it exerts a force tangent to the edge of the pulley. What is the angular acceleration of the pulley? A string is wound tight around the spindle of a top, and then pulled to spin the top. While it is pulled, the string exerts a constant torque of 0.150 N∙m on the top. In the first 0.220 s of its motion, the top reaches an angular velocity of 12.0 rad/s. What is the moment of inertia of the top?
Calculating Moment of Inertia Newton’s Second Law: F = ma and τ = Iα For a particle: τ = rF I = τ α = rF a/r = rma a/r I = mr2 For multiple particles: I = miri2 Moment of Inertia of a particle is directly related to the mass of the particle and its square of the distance from the arbitrary origin.
Moment of Inertia of a System of Particles Three particles (m1 = 2.3 kg, m2 = 3.2 kg, m3 = 1.5 kg) are connected by thin rods of negligible mass and positioned as shown. Find the rotational inertia through axes perpendicular to the page and through each of the masses. Also find the moment of inertia through the center of mass of the system. m2 5 m 3 m m1 m3 4 m
A)axis of rotation through m1 I1 = ∑miri2 = (2.3)(02 ) + (3.2)(3.02 ) + (1.5)(4.02 ) = 53 kg•m2 B) axis of rotation through m2 I2 = ∑miri2 = (2.3)(3.02) + (3.2)(02) + (1.5)(5.02) = 58 kg•m2 C) axis of rotation through m3 I3 = ∑miri2 = (2.3)(4.02) + (3.2)(5.02) + (1.5)(02) = 117 kg•m2
D) axis of rotation through the cm: Finding the center of mass (with origin at m1): xcm = ∑mixi ∑mi = (2.3)(0) + (3.2)(0) + (1.5)(4) 2.3 + 3.2 + 1.5 = .86 m = (2.3)(0) + (3.2)(3) + (1.5)(0) 2.3 + 3.2 + 1.5 ycm = ∑miyi ∑mi = 1.37 m
r12 = xcm2 + ycm2 = (.86)2 + (1.37)2 = 2.62 m2 r22 = xcm2 + (y2- ycm)2 = (.86)2 + (3 - 1.37)2 = 3.4 m2 r32 = (x3 - xcm )2 + ycm2 = (4 - .86)2 + (1.37)2 = = 11.7 m2 Icm = ∑miri2 = (2.3)(2.62) + (3.2)(3.4) + (1.5)(11.7) = 34.5 kg•m2 The I will always be least if the axis of rotation is through the center of mass!
Parallel Axis Theorem: M = ∑mi I = Icm + Mh2 h = distance from axis of rotation to cm For example, from part A: I1 = ? h2 = 2.62 m2 Icm = 34.5 kg•m2 M = (2.3 + 3.2 + 1.5)kg = 7.0 kg I1 = (34.5) + (7.0)(2.62) = 52.8 kg•m2
The masses and coordinates of four particles are as follows: 50 kg (2 m, 2 m), 25 kg (0 m, 4 m), 25 kg (-3 m, -3 m), and 30 kg (-2 m, 4 m). Calculate the rotational inertia of this collection with respect to the A) x axis B) y axis C) z axis.
Rotational Inertia of Solid Bodies • Any object can be considered to be consisting of an infinite number of parts. • If we were to use the parallel axis theorem we could divide a solid body into parts and find the rotational inertia in that manner- tedious but valid. • If we were to do so, we would find that the rotational inertia of certain objects of regular geometry would simplify to set equations depending upon the mass, radius/length, and axis of rotation! Table 11.8
A pulley with a mass of 2.5 kg and a radius of 20 cm is mounted on a fixed, frictionless axel. A block of 1.2 kg hangs from a light cord wrapped around the pulley (which can be considered a disk). When the block is released, find the acceleration of the block, the tension in the cord as well as the acceleration of the pulley. mp = 2.5 kg I = .5mpR2 R = .20 m mb = 1.2 kg
Equilibrium would mean ∑F = 0 and ∑ = 0 ! T a = ? ∑Fy = ma = mg - T ∑ = TR = I = (1/2)MR2(a /R) T = (1/2)Ma mg ma = mg - (1/2)Ma = 4.8 m/s2 a = 2mg M + 2m T = (1/2)Ma = 6.0 N = a / R = 24 rad/s2
In an Atwood’s machine, one block has a mass of 512 g while the other has a mass of 463 g. The pulley is mounted in horizontal, frictionless bearings and has a radius of 4.90 cm. When the masses are released from rest, the heavier block is observed to fall 76.5 cm in 5.11 s. What must be the moment of inertia of the pulley?
Rotational Dynamics for a Rigid Body If we consider a rigid body to be the sum of particles: v2 v1 v = r K1 = .5m1r122 m2 m1 r1 K2 = .5m2r222 Ktotal = ∑Ki r2 K = .5m1r1212 + .5m2r22 22………… K = .5miri22
Therefore the kinetic energy of a rigid body that is rotating: K = .5 I 2
Combined Translational and Rotational Motion The total Kinetic Energy of a moving object consists of two terms-- one associated with the translational motion and one associated with the rotational motion. The two terms are independent of one another vcm and can be independent of each other K = (1/2)mvcm2 + (1/2)I cm2
A yo-yo with a mass of .023 kg consisting of two disks of radius 2.6 cm connected by a shaft of radius .30 cm is spinning at the end of the string of length .84 m. What angular velocity is needed for the yo-yo to climb up the string? Assume the string to be of negligible thickness.
R = 2.6 cm Ro = 0.3 cm M = .023 kg L = .84 m At the bottom, the E is all Rotational Kinetic, while at the top it is KR, KT and Ug, so by conservation of energy: KR0 = KR + KT + U = 4gL R2 .5Io2 = .5I 2 + .5Mv2 + MgL Min. energy at top is when v = = 0 = 221 rad/s I = (1/2)MR2
A solid cylinder of radius 10.4 cm and mass 11.8 kg starts from rest and rolls without slipping a distance of 6.12 m down a house roof that is inclined 27.0˚. A) What is the angular speed of the cylinder about its center as it leaves the roof? B) The outside wall of the house is 5.16 m high. How far from the wall will the cylinder hit the level ground?