Download
1 / 19
190 likes | 357 Views
An O(n log n) Path-Based Obstacle-Avoiding Algorithm for Rectilinear Steiner Tree Construction. Chih -Hung Liu, Shih-Yi Yuan , and Sy -Yen Kuo and Yao- Hsin Chou Form DAC2009. Introduction. Problem Formulation. Flow. Local Refinement :. Critical Path Generation.

E N D
An O(n log n) Path-Based Obstacle-Avoiding Algorithm for Rectilinear Steiner Tree Construction Chih-Hung Liu, Shih-Yi Yuan , and Sy-Yen Kuo and Yao-Hsin Chou Form DAC2009
Flow Local Refinement: Critical Path Generation Obstacle-Avoiding Steiner Tree Construction OARST Construction:
MTST of Lin’s OASG is an OARSMT for any two-pin net or multiple-pin nets where an OARSMT
Shortest path Tree Multi-source SPTs are equivalent to a terminal forest of Lin’s OASG. Therefore, a terminal forest of Lin’s OASG can be constructed in O(n log n) time without constructing Lin’s OASG But the bridge edges could be O( n^2 )
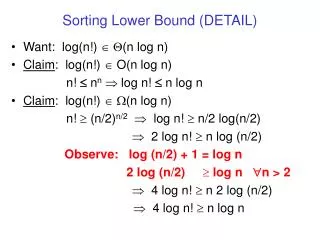
Proof: Sol of CPs ≈ MTST of OASG V1 V4 V2 P1 P2 V3 P3
OARST Construction • Since all edges of the OAST are visible we can directly transform an edge of the OAST into L-shaped rectilinear edges. • Consider the overlap between different edge.
Local Refinement • U-shape refinement • moving offset of a segment may depend on the nearest obstacle. But the nearest obstacle may be changed. • We should compute the nearest obstacle of a movable segment in O( n log n ) time.
moving a segment to touch an obstacle can be divided into two cases: • (1) touch the obstacle corners • (2) just touch the obstacle boundary.
[16] the segment dragging query problem: • Given a set of n points, pick a horizontal (vertical) segment and answer the first hit point when dragging the segment vertically (horizontally).
Experimental Result [6] is most effective O(n log n)-time method [7] achieves the best solution quality in [5] [6] [7]