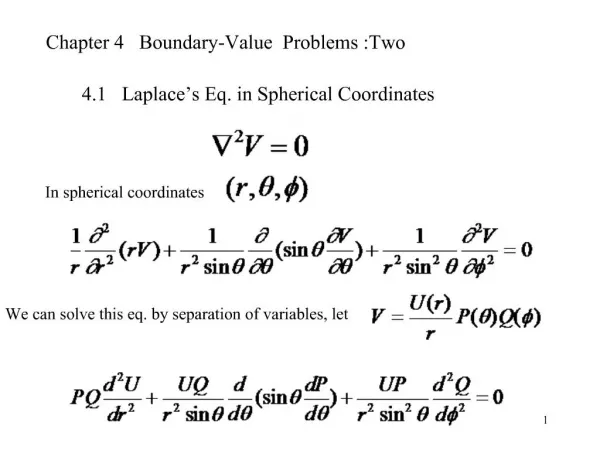
Boundary Value Formulation & Optimal Control Problems Overview
A detailed exploration of multiple shooting history, various PDE-constrained optimal control problems, and boundary value formulations with historical context. Learn about state-constrained elliptic, parabolic, and hyperbolic problems.


Boundary Value Formulation & Optimal Control Problems Overview
E N D
Presentation Transcript
Multiple-Boundary-Value-Problem Formulation for PDE constrained Optimal Control Problems with a Short History on Multiple Shooting for ODEs Hans Josef Pesch Chair of Mathematics in Engineering Sciences University of Bayreuth, Germany hans-josef.pesch@uni-bayreuth.de
Outline • A short history on multiple shooting • Multipoint-boundary-value-problem formulation • A state constrained elliptic problem • A state constrained parabolic PDE-ODE problem • A singular hyperbolic optimal control problem
Outline • A short history on multiple shooting • Multipoint-boundary-value-problem formulation • A state constrained elliptic problem • A state constrained parabolic PDE-ODE problem • A singular hyperbolic optimal control problem
The not Well-known Stone Age of Multiple Shooting Engineers: Morrison, Riley, Zancanaro (1962) Multiple Shooting Method for Two-Point Boundary Value Problems, Communications of the ACM, 1962, pp. 613 - 614. One serious shortcoming of shooting becomes apparent when, as happens altogether too often, the differential equations are so unstable that they „blow up“ before the initial value problem can be completely integrated. This can occur even in the face of extremely accurate guesses for the initial values. Hence, shooting seems to offer no hope for some problems. A finite difference method does have a chance for it tends to keep a firm hold on the entire solution at once. The purpose of this note is to point out a compromising procedure which endows shooting-type methods with this particular advantage of finite difference methods. For such problems, then, all hope need not be abandoned for shooting methods. This is desirable because shooting methods are generally faster than finite difference methods. Parallel shooting on equidistant intervals
The Pioneers Keller, Osborne (1968,69): first analysis Concept and first analysis of multiple shooting and parallel shooting Bulirsch, Stoer (1971,73): first algorithmic realisation First code (1968): BOUNDSOL: nonlinear boundary value problems Second code (1970): OPTSOL: optimal control problems with inequality constraints Bulirsch coined the term Mehrzielmethode
The Followers Deuflhard (1974,75): improved Newton method (DLOPTR) Various error norms Almost singular coefficient matrix Improved relaxation strategy Oberle (1977,83): multipoint bvps (BOUNDSCO) Improved robustness due to multipoint boundary value formulation Reduced condition number by eliminating condensation Bock (1984): direct multiple shooting (MUSCOD) First-discretize-then-optimize code with multiple shooting
Outline • A short history on multiple shooting • Multipoint-boundary-value-problem formulation • A state constrained elliptic problem • A state constrained parabolic PDE-ODE problem • A singular hyperbolic optimal control problem
Maximal Minimum Altitude Optimal Solutionfor Different Wind Profiles max! Montrone, P. 1991, Berkmann, P. 1995
bang singular 3rd order state constr 1st order state constr Maximal Minimum Altitude Optimal Solution first optimize then discretize by indirect multiple shooting altitude versus range of abort landing control versus time: rate of angle of attack
A Very Complicated Switching Structure number of interior boundary conditions: switching structure (7 pts, 12 add. var.): 3 bang-bang subarcs 2 singular subarcs 1 boundary subarc of a 1st order state constraint 1 boundary subarc of a 3rd order state constraint 1 touch point of a 3rd order state constraint 4 2 6 plus 5 additional interior boundary conditions due to modelling plus 11 usual boundary conditions given or by optimality conditions
Outline • A short history on multiple shooting • Multipoint-boundary-value-problem formulation • A state constrained elliptic problemjointly with Michael Frey, Simon Bechmann & Armin Rund • A state constrained parabolic PDE-ODE problem • A singular hyperbolic optimal control problem
subject to with Model Problem: elliptic, distributed control, state constraint Minimize
Definition of active setand assumptions Definition: active / inactive set / interface Assumption on addmissble active sets No degeneracy. No active set of zero measure. No common points with boundary
Using the state equation Optimal solution on given by data, but optimization variable Reformulation of the state constraint Transfering the Bryson-Denham-Dreyfus approach
inner outer Reformulation as set optimal control problem topology is assumed to be known Minimize subject to a posteriori check
Theorem: For each admissible the objective is shape differentiable. The semi-derivative in the direction is determines the interface Optimality system in the inner optimization of a bilevel problem subject to the optimality system of the inner optimization problem
The Smiley example: bad initial guess Algorithm can cope with topology changes to some extent
Outline • A short history on multiple shooting • Multipoint-boundary-value-problem formulation • A state constrained elliptic problem • A state constrained parabolic PDE-ODE problemjointly with Armin Rund • A singular hyperbolic optimal control problem
PDE ODE Motivation: Super-Concorde - Hypersonic Passenger Jet quasilinear PDE non-linear boundary conditions coupled with ODE 2 box constraints 1 control-state constraint 1 state constraint Project LAPCAT Reading Engines, UK
The Hypersonic Rocket Car Problem: The ODE Part minimum time control costs
The PDE-Part of the Model: The PDE Part friction term control via ODE state instationary heating of the entire vehicle
The State Constraint PDE The state constraint regenerates the PDE with the ODE ODE
Numerical results control is non-linear linear
Numerical results (topology and order of state constraint) time order 2 BA BA TP BA TP BA touch point (TP) and boundary arc (BA)
Numerical results (indirect boundary control) time order 1 BA BA BA BA BA only boundary arc
essential singularities at junction points: Dirac impulses jump in normal derivative active set non-local jump cond. in the energy non-local jump cond. in the energy except on the set of active constraint and on the junction lines Numerical results (adjoint temperature)
Outline • A short history on multiple shooting • Multipoint-boundary-value-problem formulation • A state constrained elliptic problem • A state constrained parabolic PDE-ODE problem • A singular hyperbolic optimal control problemjointly with Simon Bechmann & Jan-Eric Wurst
ellip. van der Pol The „damped“ „elliptic van der Pol Oscillator“
The „damped“ „elliptic van der Pol Oscillator“: E W S state
The „damped“ „elliptic van der Pol Oscillator“: W E bang – bang - singular control with jumps as in ODE
The „damped“ „elliptic van der Pol Oscillator“: singular region difference: zoom a posteriori verification of necessary conditions negative adjoint
Wave equation with an unusual control constraint pointwise in time Kunisch, D. Wachsmuth
Wave equation with a singular control (example 1) negative adjoint control state
Wave equation with a singular control (example 2) negative adjoint state control
Based on a partion of the domain with fixed toplogy and prescribed control laws on the interior of each subdomain Direct postprocessing step: definitions and assumptions feedback control
matching of state variable Direct postprocessing step: idea optimization variable partition of fixed topology
Semi-infinite shape optimization problem if the curve is parameterized appropriately Direct postprocessing step: Switching Curve Optimization Analogon to switching point optimization in ODE optimal control
Indirect postprocessing step: idea optimization variable partition of fixed topology
Indirect postprocessing step: Multiple Domain Optimization shape optimization inner optimization Analogon to multipoint boundary value formulation in ODE optimal control
Conclusion In state constrained or bang-singular optimal control problems there is a natural domain decomposition with matching conditions along spatial and/or temporal interior boundaries
Thank you for your attention