Coordinated Motion Function
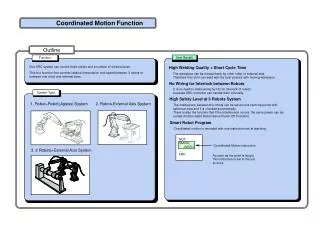
Coordinated Motion Function. Outline. Function. User Benefit. One XRC system can control three robots and a number of external axes. . High Welding Quality + Short Cycle Time.

Coordinated Motion Function
E N D
Presentation Transcript
Coordinated Motion Function Outline Function User Benefit One XRC system can control three robots and a number of external axes. High Welding Quality + Short Cycle Time This is a function that controls relative interpolation and speed between 3 robots or between one robot and external axes. The workpiece can be moved freely by other robot or external axis. Therefore the robot can weld with the best posture with moving workpiece. No Wiring for Interlock between Robots It is no need to make wiring by I/O for interlock of robots because XRC controller can handle them internally. System Type High Safety Level at 3 Robots System 1. Robot+Robot(Jigless) System 2. Robot+External Axis System The interference between the robots can be set around each tcp points with spherical area and it is checked automatically. There is also the function that if the interference occurs, the servo power can be turned off.(Non-Used Robot Servo Power Off Function) Smart Robot Program Coordinated motion is recorded with one instruction set at teaching. NOP SMOVL +MOVJ ... END Coordinated Motion Instruction 3. 2 Robots+External Axis System As soon as the point is taught, this instruction is set to the job at once.
Independent Control Function Function User Benefit Shorten Cycle Time MOTOMAN XRC can control 3 robots and a number of external axes in one control cabinet. This function makes it possible that 3 robots or a number of external axes run with each jobs independently and not synchronously. While one robot is working, the other does not have to wait and can works independently. No Interlock between Robots 6 jobs can run at the same time. It is no need to make wiring by I/O for interlock of robots because XRC controller can handle them internally Shorten Workpiece Setting Time For example... The workpiece can be set as soon as the robot is ready during other robot is running. While one robot is handling workpieces which ware welded or will be welded by the other robot, the other one welds them. No Waiting Time It is no need to have the robot waited when there are lot of calculations by arithmetic instructions because this calculation job can be executed in advance independently. The application of each robots can be not only arc welding + handling but also spot welding + handling, handling + handling and so on. Simplify Job Construction It is possible to use this function for the external axis. In this case the motor has to be Yaskawa’s servo motor. The job construction is simple because specific instructions called PSTART and PWAIT are prepared for this function. <Job Sample> Sub Task 1 Robot A Job Concurrent Job Robot 1 Job Robot 2 Job NOP * PSTART SUB1 PSTART SUB2 * PWAIT SUB1 PWAIT SUB2 END NOP MOVJ * END NOP MOVJ * END Master Task Start Concurrent Job Start Sub Task 2 Robot B Job