Download
1 / 14
140 likes | 221 Views
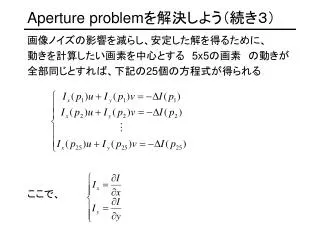
Aperture problem を解決しよう(続き3). 画像ノイズの影響を減らし、安定した解を得るために、 動きを計算したい画素を中心とする 5x5 の画素 の動きが 全部同じとすれば、下記の 25 個の方程式が 得られる ここで、. Aperture problem を解 決しよう( 続き4). 2 個の未知数 u,v が 25 個の方程式を満たすことはできない。 ここで、 u,v が与えられたときの各方程式の 2 乗誤差の和 を考えよう。 E を最小になる u,v は、以下の条件式を満たす必要がある。.

E N D
Aperture problemを解決しよう(続き3) • 画像ノイズの影響を減らし、安定した解を得るために、 • 動きを計算したい画素を中心とする 5x5の画素 の動きが • 全部同じとすれば、下記の25個の方程式が得られる • ここで、
Aperture problemを解決しよう(続き4) • 2個の未知数u,vが25個の方程式を満たすことはできない。 • ここで、u,vが与えられたときの各方程式の2乗誤差の和を考えよう。 • Eを最小になるu,vは、以下の条件式を満たす必要がある。
Aperture problemを解決しよう(続き5) • Eを最小にする条件式を展開すると、
Aperture problemを解決しよう(続き6) • を次のように書き換えることができる。
Aperture problemを解決しよう(続き7) • 従って、 は次のようになる。
Aperture problemを解決しよう(続き8) • この2個の式を合併すると、次のようになる。
Aperture problemを解決しよう(続き9) とすると、方程式 次のようになる。
Aperture problemを解決しよう(続き10) を展開すると、
問題を解ける条件 • 解ける場合 • の逆行列は存在する • はある程度大きい • ⇒ の二つの固有値l1と l2 微小ではない • の良い状態:l1/ l2は極端に大きくない • (l1 は大きいほうの固有値) • これは 良い画像特徴である条件
ATAの固有ベクトル • エッジ上の点に勾配は強くて、方向も揃っている • エッジから離れる勾配は弱い • は固有値 と対応している固有ベクトルである • ATAのもう一個の固有ベクトルは? • N は と垂直のベクトルとする • N は0の固有値と対応する固有ベクトルである。 • ATAの固有ベクトルはエッジの方向と強度に依存する (x,y) がエッジ上にあるとすると、ATAは?
Edge • 勾配は大きいが、一様である • large l1, small l2
Low texture region • 勾配は小さい • small l1, small l2
High textured region • gradients are different, large magnitudes • large l1, large l2
考察 • オプティカルフローの推定問題は二つの画像間の問題ですが、 • 一枚の画像を見るだけで、解の安定性がわかる! • それはどの画素が追跡しやすく、どの画素が追跡しにくいかを教えてくれる • 特徴追跡を行うときに大変役立つ...