Download

1 / 1
70 likes | 612 Views
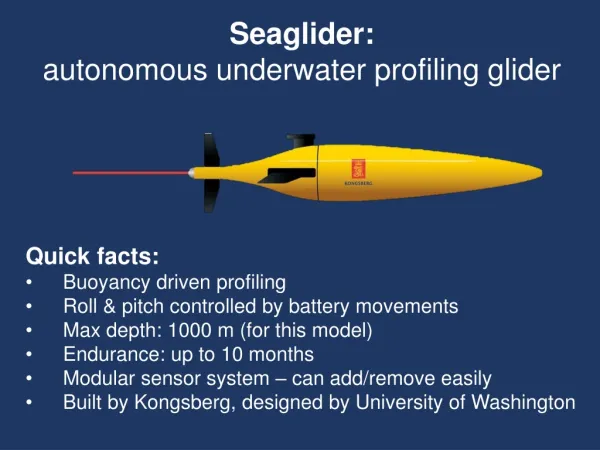
Autonomous Underwater Vehicle. Sponsor: NAVSEA Keyport Mentor: Mike Kapus. Ben Brand, Kendra Brower, Joe Langevin, Jeffrey Le. Submarine Design & Subsystems. Objective. Signals & Communications. Power.

E N D
Autonomous Underwater Vehicle Sponsor: NAVSEA Keyport Mentor: Mike Kapus Ben Brand, Kendra Brower, Joe Langevin, Jeffrey Le Submarine Design & Subsystems Objective Signals & Communications Power • Our objective was to build an autonomous underwater vehicle capable of navigating an obstacle course via the utilization of: • Image Recognition • Acoustic Localization • Torpedo Launching • Markers Dropping • Object Grasping • The vehicle will compete in the international RoboSubcompetition which takes place in San Diego, CA in July. Our task was to design and build the mechanical and electrical aspects of the vehicle while a Computer Science senior design team was responsible for the vehicle’s image recognition software. Vision To power our vehicle, we have chosen Lithium Polymer batteries for their exceptional power density. LiPo batteries are volatile if not carefully monitored, so we have integrated a multi-stage battery monitoring system to ensure the safety of those interacting with the vehicle. Navigation In order to navigate the obstacle course, our AUV must recognize and react to its surroundings. It accomplishes this using a forward and downward facing FireWire cameras. The video stream is sent to our computer where it is analyzed and used to make operational decisions. Thrusters Our navigation system allows the submarine to be aware of its depth, orientation, and heading at all times. We built an array of sensors including an accelerometer, gyroscope, depth sensor, and compass which are used in our navigation algorithm to accurately maneuver the vehicle. Inside our pressure case is an array of subsystems and sensors which need to communicate with a central computing device. To establish this communication, we designed a PCB which mates with a commercial microcontroller board. Our PCB has over 30 connectors which mate with our accelerometer, gyroscope, compass, computer, leak detector, power supply, depth sensor, motor controllers, and solenoids. Our submarine uses six thrusters to maneuver through the obstacle course. The thrusters use just 19.1v at 4.25A to produce a maximum continuous thrust of 4.85 ft-lbs. Impact Analysis Torpedo Launcher Through the design and construction of our AUV, we will impact the world in a variety of positive ways. From a societal perspective, our AUV may inspire fellow engineers to invent devices which improve people’s quality of living. From an economicperspective, inspiring engineers may also lead to financial growth in the field of robotics. Additionally, many of the components used to build an AUV are manufactured in America, thus supporting the American economy.From a global perspective, many robotic components contain rare earth metals which are primarily mined in China. Utilizing parts containing these metals could potentially be contributing to geopolitical tension between the United States and China. Furthermore, the utilization of these resources supports China’s mining efforts which are known to be detrimental to the environment. While autonomous submarines can benefit our nation’s military, they can also be used for non-combative purposes. For example, from an environmental perspective, the technology we develop can be used to clean up oil spills and even perform non-intrusive “check ups” on the habitats of reef or deep sea creatures without direct human contact. One aspect of the competition involves firing torpedoes at various sized targets. Our solution involved using SolidWorksto design a torpedo with neutral buoyancy and a center of mass about the torpedo’s geometric center. As a result, the torpedo will maintain a constant heading without pitching upward or downward. It was 3D printed to fit perfectly inside a short PVC barrel and is launched using a pneumatic piston. Our maximum target distance is approximately 8 feet. Recommendations Claws Future work for this AUV will involve improvements in efficiency by developing methods to use less air, power, and weight. The most effective way we can reduce the weight of the vehicle is to use a smaller pressure case. As a first year team, using a large Pelican case simplifies construction but results in increased buoyancy, thus requiring us to add weight to achieve neutral buoyancy. Additionally, initiatives to consume less power include improving the efficiency of the image processing code and using high-efficiency voltage regulation. Our AUV is required to grasp and release multiple objects positioned in various orientations. We have multiple claws designed to handle each unique scenario. These claws extended from beneath the sub via a 14” pneumatic piston and are retracted when the task is • Safety Precautions • Since water and electricity do not mix, we have implemented a variety of safety precautions to ensure the health and wellbeing of those interacting with the sub. These precautions include: • Emergency Kill Switches • Fuses • Leak Detection • Roll Detection • Battery Monitoring The AUV utilizes a pneumatics system powered by a 48in3 paintball tank at 3000 PSI. This pressure is then regulated down to 100 PSI and distributed into 10 solenoids through a series of manifolds. These solenoids control the air flow to different aspects of the submarine including the marker dropper, torpedo launcher, and grasping claws. All of our pneumatics equipment was generously donated by ClippardMinimatics. completed. Acoustics Acoustic signals are captured through an array of three hydrophones and processed through analog circuitry. This circuit outputs three signals which are interpreted by an FPGA which uses phase differences to determine the approximate location of the acoustic source. The FPGA then relays this information to the onboard computer via serial communication. Acknowledgements • We would like to recognize the following individuals and companies for helping us make this project successful: • Mike Kapus & NAVSEA Keyport, Dr. Patrick Pedrow, Cindy Zimmerman, Ning Hsu, Jack Hagemeister, John Yates, Kirk Reinkens, Miles Pepper, Kurt Hutchinson, Digilent, and Clippard Pneumatics. • We sincerely appreciate their contributions to making this project a success! We could not have done it without them! The task of the marker dropper is to deposit payloads into specifically labeled bins. We accomplish this using a 3D printed mechanism and a pneumatic piston. The piston pushes and pulls a sliding “trap door” which releases a 1” steel sphere. Marker Dropper Pneumatics Team Lamarr