Download
1 / 22
220 likes | 398 Views
Intro to Motors and Gears. Tom Rebold. Agenda. Types of Motors Motor Performance Specs Torque demystified Calculating Mechanical Advantage with Gears/Rollers Measuring Efficiency Demonstration: Computer Tools to Create Gears. DC “Brushed” Motor Rotation.

E N D
Intro to Motors and Gears Tom Rebold
Agenda • Types of Motors • Motor Performance Specs • Torque demystified • Calculating Mechanical Advantage with Gears/Rollers • Measuring Efficiency • Demonstration: Computer Tools to Create Gears
DC “Brushed” Motor Rotation the permanent magnets are stationary (stator) and the armature rotates, changing field polaritycommutator transfers current to armature http://en.wikipedia.org/wiki/Brushed_DC_Electric_Motor
Brushless DC Motors • More Powerful and Efficient • More Costly--Electronics to control current • the permanent magnets rotate and the armature remains static. • Computer fan motor • Floppy Drive motor (above)
AC Motors • Induction Motors (Tesla) • Kicked off 2nd Industrial Revolution, 1888 • Need 3-Phase AC power • Squirrel Cage Motors (common) • Washing Machines, Fans, • Dryers, Record Players http://en.wikipedia.org/wiki/AC_motor
Our Motor Specs • Radio Shack Gearless Motor • Voltage: 1.5 – 3 V • Current: .98 A at max efficiency • Speed: • 11600 RPM at no load (RPM=Revs Per Minute) • 8300 RPM at max efficiency • Shaft diameter ?? • Output ?? • Torque: ??
Our Motor Specs • Radio Shack Gear Motor • Voltage: 1.5 – 3 V • Current: .18 - .25 at no load .7 A at max efficiency • Speed: • 8700 RPM at no load • 5800 RPM at max efficiency • Shaft diameter .0787 mm (more like1.5 mm) • Output .31 W • Torque: 5.3 g/cm …is this accurate?
What is Torque? • Also called Moment • A rotational force applied to a lever • Using 3D Vector Notation • In 2 Dimensions • A force of 3 Newtons applied 2 meters out = force of 6 Newtons applied at 1 meter = 6 N-m http://en.wikipedia.org/wiki/Torque
Angular vs Linear Motion Analogies • Linear Motion: • force, mass, acceleration • Angular Motion: • torque, moment of inertia, angular acceleration
Some Other Units of Torque • Torque = Force x Distance • SI Units: Newton-Meters (1N = 1 kg-m/s2) • English Units: • Foot-Pounds • Oz-Inches (for small motors) • Q: what is our gearmotor unit? • A: 5.3 g/cm ???? • see: http://www.shinano.com/xampp/skvconv.swf
Converting Units of Torque • The method of unit analysis: • 5.3 g-cm = 5.3 x 1 kg x 2.2 lb x 16 oz x 1 in 1000g 1 kg 1 lb 2.54 cm = .06929 oz-in • What about N-m ? A Newton = 1 kg – m/s2 • The force of 1 kg accelerated 1 m/s2 • But on Earth, 1 kg is subject to g= 9.8 m/s2
Converting N-m to ft-lbs • To go from N-m to ft-lbs, first remove the contribution of g, gravitational acceleration: • In other words, 50 N-m is like putting a 5.1 kg mass on the end of a 1m wrench and letting gravity (g) pull it down • Or a 36 lb weight on a 1 ft wrench • Or a 1 lb weight on a 36 ft wrench
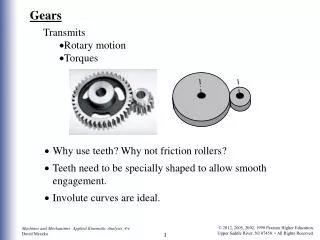
Gearing Up Torque • The Torque of a high speed DC motor is very small…0.069 oz-in ?? That’s tiny! • However we have 6000 RPMs, way too high • Gears let us cash in RPMs for more torque
How it works • The force applied at the edge of the small gear • F = T1/r1 • Creates greater torque on the large gear T2=F x r2 F T2=T1 x r2r1 r2 r1 T1=F x r1
Effect on RPM (angular velocity) • The Torque on the large gear has been amplifed • The speed on the large gear has been reduced T2=T1 x r2r1 F w2=w1 x r1r2 r2 r1
The Example of Spindle to CD • Motor Shaft Diam=1.5mm • CD Diameter = 120 mm • Motor Torque= 0.069 oz-in • CD axle Torque • =.069*(120/1.5) • =5.5 oz-in • CD RPM • =6000*(1.5/120) • =75 RPM
Power Efficiency in Motors and Gears • These are ideal calculations • In reality, there are losses due to friction, slippage • Also, the motor itself is not 100% efficient • As Engineers, we will be very interested to learn what the efficiency of our machine is • And how to optimize it
Efficiency of Motors • Motors convert Electrical Power into Mechanical Power • Input Power is the product of Volts x Amps • What about output power? • Power = Energy/Time • Energy = Force*Distance (= Torque*Angle) • Therefore Power = Force * Distance/Time or F*v
To Measure Motor Output Power • We can set up a spool to wind a string • If we can raise a Mass M (kg) by D (m) in T (sec) • We are applying a force M*g over D m/T sec • Power = M*g*D/T • Suppose M= 0.5 kg, D=0.5m and T=2 sec • Power = .5* 9.8 * .5 / 2 kg-m2/s2 = 1.225 Watts D M
Efficiency • Suppose in the previous test we measured the motor drawing .5A of current at 6 V. • Pin = .5 * 6 = 3 W • Pout = 1.225 W • Efficiency is just Pout/Pin converted to % • Efficiency = 1.225/3 = .408 = 40.8%
What about measuring Torque? • We can take the data from the last example: • F = M g = .5*9.8 = 4.9 kg – m/s2 = 4.9 N • Suppose the Radius of the spool is 2 cm • Torque = 4.9 * .02 = .098 N-m
Big Picture • This is essentially how the whole power grid works. A generator (opposite of motor) creates electricity, wires distribute it, and then it runs our appliances (motors, TVs, etc) with a certain efficiency at each step. If we can improve the efficiency, we can reduce fuel expenses, save $$ and resources, etc. • Engineers are all about improving efficiency (through ingenuity…for example LED lighting)