Download
1 / 24
240 likes | 397 Views
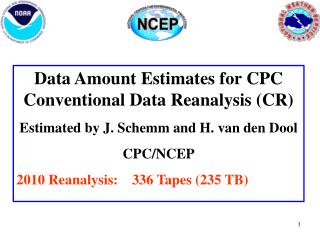
Geocenter motion estimates from the IGS Analysis Center solutions P. Rebischung, X. Collilieux , Z. Altamimi IGN/LAREG & GRGS. EGU General Assembly, Vienna, 26 April 2012. Background. Global GNSS solutions are sensitive to geocenter motion in two different ways:. Through orbit dynamics.

E N D
Geocenter motion estimatesfrom the IGS Analysis Center solutionsP. Rebischung, X. Collilieux, Z. AltamimiIGN/LAREG & GRGS EGU General Assembly, Vienna, 26 April 2012
Background • Global GNSS solutions are sensitive to geocenter motion in two different ways: • Through orbit dynamics • Through loading deformations
Background • Main limitation of « orbit dynamics »: • The non-gravitational forces acting on GNSS satellites are not modeled accurately enough. → ACs have to estimate empirical accelerations which correlate with the CM location (origin). Example of accelerations that would be felt by a satellite if CM was shifted by 1 mm in the Z direction. Accelerations are shown in the « DYB » frame: ― D:Satellite-Sun axis ― Y: Rotation axis of solar panels ― B: Third axis Correlations with some parameters of the CODE model are obvious (constant along D; once-per-rev along B).
Methodology • Data: • Weekly solutions from 7 ACs (COD, EMR, ESA, GFZ, JPL, MIT, NGS) • 1998.0 – 2008.0 : reprocessed solutions • 2008.0 – 2011.3 : operational solutions • Stacking: • For each AC, stack weekly solutions into a long-term piecewise linear frame. • Geocenter motion estimation: • Pseudo-Observations = weekly minus regularized position differences • Three possible models
Methodology • Network shift approach • CF approachaka degree-1 deformation approach • (Blewitt et al., 2001) • CM approach(Lavallée et al., 2006) Observation equations • In the following, use: • well-distributed sub-network • identity weight matrix In the following, use nmax=5 In the following, use nmax=5 with degree-1 Love numbers in CF frame with degree-1 Love numbers in CM frame from orbit dynamics Estimates of rCM-CF from loading deformations In the CM approach,both information contribute to the same estimate (because degree-1 deformations have a translational part in the CM frame).
Z: network shift approach • Sub-annual frequencies corrupted by (odd) draconitic harmonics All ACs affected
Z: network shift approach • Low frequencies well explained by annual + 1st draconitic: → Progressive phase shift wrt SLR • Similar patterns for ACs using the CODE model • Different pattern for JPL (and EMR?) • Underlying annual signal unreliable:
Z: CF approach • Draconitics smaller than in the network shift approach:
Z: CF approach • Annual signal in phase with SLR for all ACs, over the whole time period • But amplitude over-estimated: • Also found with simulations (see Collilieux et al., JoG 2012) • Aliasing of >5-degree deformations?
Note on the CM approach • CM approach ≈ weighted mean of orbit dynamics and loading deformations ≈ 0.65 for X≈ 0.60 for Y ≈ 0.45 for Z ≈ 0.35 for X≈ 0.40 for Y ≈ 0.55 for Z with nmax=5
Z: CM approach • Some draconitics averaged; other cancelled (depending on their relative phases in Zshift and ZCF)
Z: CM approach • ZCM alternately: • In good agreement with SLR; • ≈ 0; • Out-of-phase (recently, except JPL). → Is it really reasonable to make this weighted mean?
X • Network shift approach: • Draconitics up to 2 mm • Annual signal partly detected • CF approach: • Draconitics as large as in net. shift • Annual signal in phase with SLR • Amplitude over-estimated • CM approach: • Sometimes in good agreementwith SLR • But not always
Y • Network shift approach: • Draconitics up to 2 mm • Rather good annual signal • CF approach: • Draconitics as large as in net. shift • Rather good annual signal • But slight phase shift for some ACs • CM approach: • Strikingly good agreement with SLR • Net. shift & CF errors cancel out.
Conclusions (1/2) • Network shift (orbit dynamics): • All ACs affected by draconitics as large as « true » annual signal • Effect of draconitics different for JPL (and EMR?) than for other ACs in Z(JPL’s first draconitic not in phase with other ACs) • Underlying annual signals: • Unreliable in Z • Partly detected in X • Agrees well with SLR in Y • CF approach (loading deformations): • Also corrupted by draconitics • As large as in network shift in X & Y • But ~twice smaller in Z • Annual signals in phase with SLR • But amplitudes over-estimated in X & Z
Conclusions (2/2) • CM approach (≈ weighted average): • In X & Z, network shift and CF errors cancel sometimes out,but not always. → Isn’t the unification of orbit dynamics and loading deformations questionable? • Strikingly good results in Y: network shift and CF errors cancel out. → Why?
Note on the network shift approach • Using raw cov. matrices gives unrealistic results: • Shift estimates are perturbedby correlations with degree-1deformations. ≈ 0.5 for X & Y ≈ 0.8 for Z
X: draconitic harmonicsRadius = 2 mm 1st 2nd 3rd 4th 5th 6th 7th Network shift CF CM
Y: draconitic harmonicsRadius = 2 mm 1st 2nd 3rd 4th 5th 6th 7th Network shift CF CM
Z: draconitic harmonicsRadius = 5 mm 1st 2nd 3rd 4th 5th 6th 7th Radius = 10 mm Network shift CF CM