Download
1 / 21
210 likes | 302 Views
Explore the narrow escape problem for surface-mediated diffusion, overlap of Brownian trajectories, and optimized mean times to target depending on diffusion constants and domain parameters. Investigate surface and bulk excursions, potential optimizations, and mathematical models. Collaborative research from Moscow State University physicists.

E N D
Narrow escape times in microdomains with a particle-surface affinity and overlap of Brownian trajectories. Mikhail Tamm, Physics Department, Moscow State University In collaboration with Gleb Oshanin, Oleg Vasilyev, Satya Majumdar and Alena Ilyina.
General outline. I. Narrow escape problem (NEP) for surface-mediated diffusion. • The definition of the problem. • Qualitative discussion and initial guesses. Why to expect some optimization here? • Mean-field theory of the problem. Why there is no optimization in the mean field. • Going beyond mean-field (O. Bénichou, D. Grebenkov et al.) II. Overlap of Brownian trajectories. • Definition of the problem and its connection to the NEP one. • General theory of how to calculate the mean overlap. • Many walkers starting from a single point: overview of the results and a phase diagram. • Two walks starting at separate points: numerical results for scaling functions.
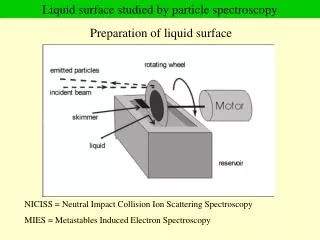
NEP problem: definitions. You have a particle in a spherical domain which is capable of being reversibly adsorbed on its inner surface. It can diffuse both in the bulk and on the surface with diffusion constants D2 and D3, respectively. There is a hole (or target) on the wall which you want the particle to find. You are interested in the mean time it takes to find the target depending on the diffusion constants, the size of the domain R, the size of the particle a and the size of the target b;and – most importantly – of the mean length of a surface excursion t. The case will be considered.
NEP problem: what to expect? On the one hand: there is much less space on the surface than in the bulk, so the larger t the better? On the other hand: diffusion in 2D is marginally recursive, therefore bulk diffusion may provide us with useful shortcuts which help to avoid oversampling the same already visited points on the surface. Also, generally speaking, t and D2 are not independent. Thus, there rises a possibility that an optimal t exists!
NEP problem: naïve guess. The search process consists of recurring steps, each of them consisting of a “search try” on the surface and a bulk excursion. Therefore, one may expect for the escape time where is the mean length of a bulk excursion and N is the average number of attempts it takes to find a target. Also, if separate search tries are independent, one expects where is the mean area visited in one try.
We start with determining the length of the single bulk excursion . To define it, one needs to address a somewhat subtle question: what does it actually mean that a particle desorbs after time t? It is not enough to assume that it just changes from “adsorbed” state to “bulk” state, it should also get significantly far away from the surface (say, by some distance s = ga), otherwise it will immediately adsorb back. To define what g (and, therefore, what ) one should actually choose, we revisit the known case of searching for a target in a domain with perfectly reflecting boundaries. The survival probability in this case is known to behave as where n is the number of independent tries in search of a boundary the particle made up to time t, and is the probability that it have made exactly n such tries. Reflecting boundaries: infinitely small t. In turn, if we assume that by touching the surface once a particle explores the area equal to its cross-section , we may rewrite S(t) in the form
Now, the desired function can be expressed in terms of the probability distribution of a single excursion P(t), i.e. the probability that a particle diffusing from the point located at a distance s from the wall will survive exactly up to time t. Indeed, if are the Laplace transforms of P(t) and , respectively, then one can show that Reflecting boundaries: infinitely small t. and in turn, P(t) can be easily calculated by solving a diffusion equation with adsorbing boundary conditions. The answer is This probability is essentially zero for , decays as and has an exponential cut-off at
This allows us to get the following expressions for the distribution , the mean length of the excursion and the survival probability in the small t limit in terms of s: Reflecting boundaries: infinitely small t. Thus, we get which gives us the desired regularization.
where are Legendre functions, and Boundary diffusion: calculation of A(t). To calculate the area sampled in one search try we recall the solution of a first passage problem on a sphere. It is known that where S(t) now is the survival probability of a particle diffusing on a sphere (with no bulk excursion, i.e. ), the first multiplier on the r.h.s. corresponds to the fact that we may find a target immediately with no need for diffusion at all, and the coefficients are given by Most importantly, which allows us to get in the large t limit
The first term here corresponds to not finding a surface at all up to time t and is (in real space) rapidly decaying, in the second one is a Laplace transform of the survival probability distribution for one search try, it reads NEP: the mean-field result. Now, combining all the ingredients, and assuming that the different search attempts are independent one gets for the survival probability in the Laplace space Keeping just the first term in these series and expanding at small l one gets finally for the survival probability at large t
NEP problem: going beyond mean-field. This means there is NO optimization, at least within the simple approximation presented. • What have gone wrong? • Tries are actually not independent! • The interference of the tries depends on the length of a bulk excursion between them! • The small-l expansion kills nonlinearity in A(t)!! However, it turned out to be possible to go beyond mean-field within a somewhat different approach. O.Bénichou, D. Grebenkov, et al. J. Stat. Physics, 142, 657 (2011).
Overlap of the Brownian trajectories. How many common cites will these two trajectories visit on average?
Overlap of the Brownian trajectories. More precisely, assume you have n random walkers starting at points at time zero, and making random walks of lengths , respectively, starting from these points. The question is what is the expectation value of the number of the cites visited by all these walkers? • Note, that • if n = 1 the corresponding value is just the volume of a Wiener sausage; • the case n = 2 and x1 = x2 is special. Indeed, then iii) the expectation value of the overlap can be written in the form where is the probability that cite x is visited by all workers, and is the probability that it is visited by one walker, and we have allowed for the fact that walkers are independent.
Now, the probability is easy to express in terms of the propagator of our random walk. Indeed, in the Laplace space one has Overlap of the Brownian trajectories. where are discrete Laplace transforms, and g(r,m) is a probability for the end-points of a random walk of length m to be separated by a distance r. This allows us to write Brownian motion is recurring in D < 2 and non-recurring in D > 2, thus
Consider the case of , i.e. all walkers starting from origin: Many trajectories from one source. It turns out that asymptotically for large trajectories three distinct asymptotic regimes are possible.
Many trajectories from one source. 1. D < 2 and any n: recurring walks, finite probability of an overlap at each step, ; 2. D > 2 and the walks intersect only near the origin ; 3. intermediate D and n
Many trajectories from one source. Numerical data is supporting the predicted “phase diagram”. Here the results for D = 1, 2, 3 are presented, the numbers on the right are the numbers of walkers corresponding to each curve, red lines are scaling laws predicted by the theory, cases D = 2 and D = n = 3 are marginal, the logarithmic corrections to power laws are predicted in these cases.
Two trajectories starting at different points. can be rewritten in the form
These are numerical results on a square lattice for D = 1 (left) and D = 2 (right). Overlaps for R > 0 are converging to those for R = 0. Note that this gives rise to The appearance of a maximum on the curve in 2D. Clearly, this maximum exists for any D belonging to the “intermediate phase” introduced above, i.e. for in case of two walkers. Two walkers starting at different points. Thus, for two walks starting at a given distance there exists an optimal length when they overlap most!
Drawing the overlap functions in the properly rescaled variables, namely versus , one gets a nice scaling collapse. Finding analytical expressions for these functions sounds like a nice problem to solve. Two walkers starting at different points.
Conclusions and take-home messages. Concerning narrow-escape problem: • It is possible to optimize the escape time by playing with adsorption-desorption. • In 3D with 2D boundary the effect is small. • Do not try mean-field here: correlations between excursions are important. Concerning the Brownian trajectories’ overlap 1. There exist three different regimes depending on the number of particles and dimensionality of the space. 2. In the intermediate regime there is an optimal trajectory length, at which the “overlap fraction” is maximal. 3. If normalized by the overlap of trajectories starting at the same point, the overlap function converges to a scaling function, which is still to be calculated explicitly.