Download
1 / 21
210 likes | 378 Views
Performance Evaluation of Precise Point Positioning (PPP) and Long-Range Baseline Approach Used in Offshore Applications. Don Kim, University of New Brunswick Christopher Griffith, Gemini Navsoft Technologies Inc. Bob Haagensen , Ocean Wireless Data Systems Inc.

E N D
Performance Evaluation of Precise Point Positioning (PPP) and Long-Range Baseline Approach Used in Offshore Applications • Don Kim, University of New Brunswick • Christopher Griffith, Gemini Navsoft Technologies Inc. • Bob Haagensen, Ocean Wireless Data Systems Inc. • Sang Hyun Park, DeukJaeCho, KiYeolSeo, Korea Institute of Ocean Science and Technology PPP Workshop, Ottawa, Ontario, Canada June 12-14, 2013
Offshore GNSS Applications About 250 of the world’s 790 deep-water drilling rigs are dynamically-positioned (DP). Six to 10 new DP rigs are being built every year. Deep-water rigs are serviced by a global fleet of about 2200 platform supply vessels. That fleet is also expanding at about 10% a year. Offshore DP drilling rig operators typically rely on two independent satellite links for GPS corrections. They also rely on acoustic transponders on the seabed to tell them where they are and to keep them there. Image courtesy of Transocean, Inc. • Potential high precision GNSS techniques for the DP applications: • Precise Point Positioning • Relative Positioning (RTK style) • Measurement Filtering • The resulting GNSS accuracy is hardly ever better than about one meter. • About a third of “Yellow Alert” DP events are caused by malfunctions in their satellite GNSS systems.
GNSS Errors Sensing Mechanism Directly sensed by the GNSS measurements. Some in the GNSS measurements but others propagated through the observation equations. Not in the GNSS measurements but propagated through the observation equations.
Pre-Whitening for Signal Detection The generic signal detection problem: a received noisy signal x(t) either contains a known deterministic signal s(t) or not. Noise GNSS errors and noise GNSS Range measurements Received signal Pre-whitening filter Pre-whitening filter Known signal Range signal Range observation equations Replica signal When the process is colored rather than white, the colored process can be transformed into a white process by passing it through a whitening filter.
Whitening Process in GNSS Data Processing • Relative Positioningapproaches whiten the range measurements by removing common error sources at both satellites and receivers. Pre-whitening filter DD Pre-whitening filter Uncommon errors or significant residuals can survive throughout the pre-whitening process and subsequently result in biased solutions. Error Modeling • PPP approaches whiten the range measurements by sophisticate error modeling algorithms. Unmodeled or mismodeled errors can survive throughout the pre-whitening process and subsequently result in sub-optimal solutions.
A New Approach: Measurement Filtering Since the range measurements contain a variety of error components with well characterized wave frequencies in the spectrum, signal filters (e.g., a low, high or band-pass filter) can effectively remove those error components. Measurement Filtering approaches whiten the range measurements by signal filters. Pre-whitening filter Bandpass Filter Key Design Concept: • Low cost but high accuracy and precision. • No dependency on 3rd party products or services. • Simplify the implementation of data processing algorithms. • Avoid the risks induced by the commonality assumption.
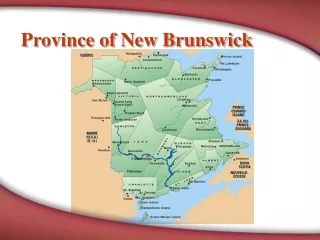
Simulation Test Scenarios Permanent CACS tracking sites (FRND and HLFX) Site displacement effects: Solid earth tide, polar tides, ocean loading, atmospheric and ground water and snow build-up loading Atomospheric effects: Ionospheric and tropospheric delay Satellite effects: Satellite orbit error, clock offsets, antenna phase centre offsets and variations, and phase wind-up Image courtesy of Google Map
Solid Earth Tide Simulation • Comparison of the baseline solutions associated with solid earth tide effects: • ITRF coordinates correction (cyan), • GNSS measurements correction (red), • No solid earth tide correction (magenta) • The measurement filtering technique effectively blocked the solid earth tide signal in the data processing. At each simulation test, the measurement filtering technique was used to get the baseline solutions.
Ionospheric Delay Simulation • Comparison of the baseline solutions associated with ionospheric effects: • Dual-frequency (Iono-Free) approach (red) • Single-frequency (L1) approach (magenta) • The signal spectrum of the atmospheric effects was relatively wide but overall the measurement filtering technique could effectively block them. At each simulation test, the measurement filtering technique was used to get the baseline solutions.
Satellite Orbit Error Simulation • 3-D plot of the baseline solutions using different approaches: • NRCan’s online PPP solutions (green) • Measurement filtering using the IGS Final orbit (red) • Measurement filtering using the Broadcast Ephemerides (blue) • How serious is the receiver clock synchronization error?
DGNSS Network (Korea) 376 km 259 km 444 km Image courtesy of Google Map
Baseline Solutions & Residuals One month of data processing results using the measurement filtering technique revealed relative station movement. The residuals of baseline solutions indicate that the measurement filtering technique successfully whitened the errors in the measurements.
Relative Station Movement Trends N CCHN DOKD E D EOCH GEOM Image courtesy of Google Map
Previous Study in the Test Area This map illustrates the horizontal surface motions of GPS sites in Asia where the Indian, Eurasian, Pacific and Philippine see plates are in collision. One month of data processing results using the measurement filtering technique agree very well with this tectonic movement study carried out by other research groups. Image courtesy of Eric Calais (Purdue University), Ming Wang (Institute for Geology and Earthquake Science, China) and ZenghangShen (IGES)
Conclusions - Measurement Filtering Advantages: • Most of significant error sources can be filtered out using an appropriate measurement filter. • Requires neither sophisticate error modeling nor high quality products from international geodetic science organizations (e.g., the IGS precise orbit and clock products). • Does not rely on common (correlated) error sources between satellites and receivers. • Immune to long baseline conditions as well as localized anomalous atmospheric conditions. Disadvantages: • Error sources spreading over unblocked (pass) frequencies can survive throughout the pre-whitening process and subsequently can result in sub-optimal (biased) solutions.
Future Work • Improved signal (measurement) filter design and its implementation in the commercial GNSS processing software. • Launch a test project with Ocean Wireless Data Systems Inc. and deep-water drilling rig company. • Collaboration with R&D sectors (government, academia and research institutes) for the validation of our new GNSS positioning approach in academic and scientific applications.
Acknowledgement • R&D Support • CACS Section, Geodetic Survey Division of Geomatics Canada, Natural Resources Canada • DGNSS Central Office, Ministry of Oceans and Fisheries, Korea • R&D Funding • Natural Sciences and Engineering Research Council of Canada – Discovery Grant • National Research Council Canada - Industrial Research Assistance Program • Korea Research Council of Fundamental Science and Technology - National Agenda Project