Download
1 / 21
210 likes | 417 Views
Real-Time GPS Processing with Carrier Phase. FILTER PARAMETER INFLUENCE ON GPS CARRIER PHASE REAL-TIME TIME AND FREQUENCY TRANSFER FOR SHORT AND LONG BASELINES Carsten Rieck, Per Jarlemark, Kenneth Jaldehag and Jan Johansson

E N D
Real-Time GPS Processing with Carrier Phase • FILTER PARAMETER INFLUENCE ON GPS CARRIER PHASE REAL-TIME TIME AND FREQUENCY TRANSFER FOR SHORT AND LONG BASELINES • Carsten Rieck, Per Jarlemark, Kenneth Jaldehag and Jan Johansson • SP Swedish National Testing and Research InstituteBox 857, S-501 15 Borås Sweden • 36th PTTIDecember 7-9, 2004 • Washington DC
Real-Time T&F GPS • Introduction • Real-time-GPS Filter • Station Position Correction Estimation • Satellite Orbits • Earth Tide Modeling • Long Baselines • Conclusions and Future Work
Real-Time T&F GPS: Principle Operation Client/Server Data Streaming CLK1 IGS-Orbits • KF-States • CLK1-2, …CLK1-N • TROP1, … TROPN • STAPOS1, …STAPOSN • AMBIGUxy x – clockdiff y – satellite REC1 CLK2 REC2 InterNetwork TCP/IP Real-Time Kalman Filter . . . CLKN RECN Residuals: Receiver Pair/Sat Broadcast EPH
Real-Time Kalman Filter Raw Data - common view differential phase observations, L3 ionospheric ”free” phase, P3 code support, • satellite orbits (broadcast, IGS predicted,P3)- earth tides (simple elastic)- continental drift, rebound- ocean loading (optional) Modeling RT Filter - forward Kalman filter, Matlab/GNU Octave, CLK STATROP STAPOS AMBIGU purely L3 based, RW noise model non standard troposphere, RW noise model station position corrections, constant non-integer ambiguities, constant
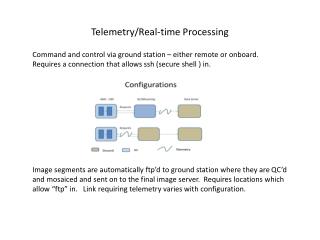
Method & Result Verification • “real-time” streaming of RINEX observation and navigation files to the filter software • RT results compared to solutions based on • TWSTFT, • Circular-T, • GPS post-processed PPP, • GPS-P3 • Real-Time
Station Position Offsets • assume: perfect orbits & atmosphere modeling, • max range error is initially absorbed by the respective (non-integer) satellite ambiguity parameter • Several different filter state variables have to compensate for an absolute range error of 2: • CLK • STATROP • residuals • SAT AMB
West->East Dominance of Satellite Passes A majority of all satellite passes have a west-east orientation and thus dominantly influence the initial satellite ambiguities in one direction.
Station Position Offset Example SP-PTB • East : 10 mm offset f 200 ps/day • North : 10 mm offset f 35 ps/day • Vertical : 10 mm offset f 2 ps/day
Station Position Correction • If station positions are not properly known they can be estimated as constant offsets from an approximate position. • Offsets do not necessarily reflect real positions but correct for wrong baseline geometry (local).
Orbit Position Modeling • Broadcast Ephemerides have an uncertainty of about 2m (IGS). • IGS ultra-rapid orbit predictions are available in real-time and can be used to correct broadcast orbits.
Earth Tide Modeling – Complex & Ocean Loading http://www.oso.chalmers.se/~loading
Transatlantic Baselines : UTC(SP)-UTC(USNO) >3x >3x ALGO 1484 km SP01 786 km 622 km MDVJ USNO AMC2 PTBB 2361 km • support stations allow to estimate a better local troposphere precise station positions and good orbits needed ! >1x 6184 km • 1 common sat observation versus 3 states (clk+2trop)
Conclusions and Future Work • In good agreement with GIPSY, TWSTFT and Circular-T. • UTC(SP) –UTC(PTB): 40ps/day frequency offset between TWSTFT and RT. • RMS differences of 50ps between real-time processing and GIPSY PPP post-processing are achievable. • To do … filter : • combination with code, steer the long term frequency, • loading models, correct short term frequency, • short smoothing, • KF code migration to a ”clean” POSIX environment. • To do … real-time data handling: • support for raw data streams, NTRIP,… • encryption, authentication, • multicast mode.
Thanks and Contact • Thanks to: • IGS • Open Source Community • LMV, National Land Survey of Sweden • OSO, Onsala Space Observatory • Contact : • Carsten Rieck carsten.rieck@sp.se • SP / Mte http://tempus.sp.se • Box 857 +46 33 165440 • Borås / Sweden