3D Liver
3D Liver. Uma Ferramenta de Segmentação Semi-Automática do Fígado. Correia, MM; Feitosa,RQ e Oliveira, DAB – UNIGRANRIO, PUC-RJ -. Introdução. Importância da segmentação anatômica Meios de identificação da segmentação. Objetivo.


3D Liver
E N D
Presentation Transcript
3D Liver Uma Ferramenta de Segmentação Semi-Automática do Fígado Correia, MM; Feitosa,RQ e Oliveira, DAB – UNIGRANRIO, PUC-RJ -
Introdução • Importância da segmentação anatômica • Meios de identificação da segmentação
Objetivo • Segmentação e Reconstruçãodo fígado a partir de imagens de tomografia computadorizada
Legenda: Ar Orgãos e músculos Tecido ósseo Gordura Segmentação dos pulmões 1) Definição bruta de regiões por limiarização Contagem de pixels Imagem Intensidade Histograma
O modelo 3D completo foi reconstruído a partir das estruturas definidas pelas máscaras de tórax, tecido ósseo, pulmões e árvore vascular. • Reconstrução 3D
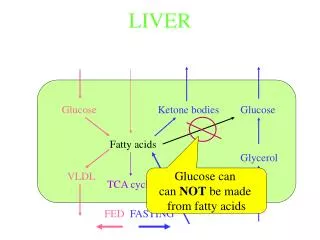
Premissas • O fígado é o maior órgão maciço presente na região abdominal. • Sempre está predominantemente presente no lado direito do paciente. • Os tomos são finos o bastante para que uma “fatia” do fígado sempre esteja conectada com outra adjacente.
Detalhamento do Processo • Importação da tomografia para o MATLAB. • Produção do histograma (processamento matemático) • Seleção da região de interesse no histograma. • Binarização (branco/preto) para obter objetos com densidade de órgãos e músculos. • Definição da intensidade média da região do fígado. • Seleção da região do histograma referente ao fígado. • Binarização obtendo objetos com densidades muito próximas à intensidade média do fígado. • Eliminação de regiões indesejáveis através do estudo espacial do objeto. • Seleção do fígado usando informações da “fatia” diretamente adjacente à analisada no momento.
A região de interesse é a que compõe os órgãos é músculos. Calcula-se a intensidade média total da pilha de imagens. A região de interesse estará presente ao redor do próximo pico de maior intensidade a partir da média. Seleção da Região de Interesse no Histograma Ar Adiposo Órgãos e músculos Ósseo
Seleção Automática da Região de Interesse no Histograma com Base na Escala de Cinza
Definição da Intensidade Média da Região do Fígado • O observador define uma fatia que sabidamente contenha o fígado e é obtido o maior objeto cujo centróide se encontra no primeiro quadrante da imagem. • Calcula-se a intensidade média deste objeto.
Seleção da Região do Histograma Referente ao Fígado e Binarização É definida uma janela ao redor da intensidade média calculada anteriormente. Uma nova imagem binaria é obtida onde somente os pixels contidos nesta janela são considerados. É realizada uma operação de preenchimento automático da imagem resultante.
Eliminação de Regiões Indesejáveis Através do Estudo Espacial do Objeto • O maior objeto 3D entre o conjunto de objetos obtidos na segmentação 2D é escolhido. • É realizada uma operação de opening 3D no objeto selecionado com a finalidade de eliminar falhas de segmentação 2D, como por exemplo a inclusão acidental de órgãos adjacentes em algumas fatias.
Eliminação de Regiões e Seleção do Fígado A partir das fatias do novo objeto 3D segmentado é realizado um estudo de identificação e localização espacial. • Três condições em cascata são testadas para que uma região da “fatia” seja considerada componente do fígado: • A ordem do objeto a ser analisado no tomo é definida pelo tamanho (sempre considera o maior objeto). • Se o centróide do objeto estiver no lado direito da imagem, ele é eliminado e o algoritmo pega então o próximo maior objeto do tomo. • A partir da primeira identificação de objeto à esquerda todo novo objeto deve estar conectado com o objeto classificado como fígado no tomo anterior. • O algoritmo começa de uma fatia que sabidamente contenha o fígado e faz a busca nas fatias acima e abaixo da inicial.
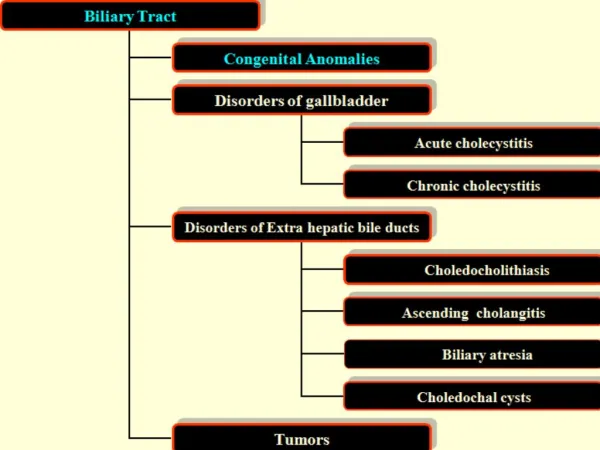
Segmentação de Couinaud Veias Hepáticas Veia Porta
Segmentação das Árvores Vasculares do Fígado • A partir do fígado segmentado são extraídas as veias porta e hepática por crescimento de regiões (algoritmo de processamento de imagens de expansão do vaso a partir de pontos próprios do vaso próximos uns aos outros nos tomos). • Os ramos que compõem cada veia são isolados em objetos independentes. • A direção e posicionamento dos ramos permitem a definição de planos que separam o fígado nas diversas subregiões. • O algoritmo prevê que as árvores não se toquem - o que nem sempre é verdade .Solução em desenvolvimento.
Segmentação das Subregiões do Fígado • Para cada veia é buscado o plano que minimiza o somatório das distâncias entre pontos. • Matematicamente temos: Sendo: • Aplicando Lagrange:
Segmentação das Subregiões do Fígado • Aplicando Lagrange: Tem a forma Ax=ux. A solução é o autovetor associado ao menor autovalor de U. A escala é obtida por: Tendo os coeficentes a, b e c, obtemos o d pela equação:
Segmentação das Subregiões do Fígado • Verifica-se quais dos 3 planos obtidos para cada caso é mais próximo da vertical/horizontal, dependendo do que estamos buscando. • Dessa forma são definidos: • três planos verticais que acompanham a direção de cada veia hepática. • um plano próximo do horizontal correspondente à bifurcação da veia porta. • Os quatro planos definem as oito regiões de Couinaud.
Reconstrução 3D • A partir da posição dos voxels (pixel 3D = cubo) em relação aos planos definidos definem-se as regiões que irão compor o modelo tridimensional. • Foi utilizada a Biblioteca VTK e JAVA (linguagem) para renderização (processo de geração da imagem 3D) e visualização dos objetos segmentados. • Cada “objeto” 3D tem então a superfície suavizada antes da visualização.
Visualizar individualmente cada segmento, setor e lobo. Visualizar separadamente cada leito venoso (hepático e/ou portal) Associar combinações de visualização de segmento(s) e veia(s) Atribuir e modificar cores e transparências Deslocar no espaço, rodar, translacionar, ampliar ou reduzir o fígado Facilidades já Disponíveis no Aplicativo
Cálculo da volumetria Visualização volumétrica (permite visualização de nódulo no interior) Visualização em separado de cada ramo segmentar Identificação dos ramos biliares e da vesícula biliar Ferramentas para cirurgia virtual Facilidades em Desenvolvimento para o Aplicativo
A New Practical 3D Tool for Liver Computer-Assisted Operation Planning. Correia MM1, Feitosa RQ2 and Oliveira DAB3 School of Medicine, University of Grande Rio (UNIGRANRIO) , Rio de Janeiro, Brazil School of Engineering, University of Grande Rio (UNIGRANRIO) and Department of Electric Engineering, Catholic University of Rio de Janeiro, Rio de Janeiro, Brazil Department of Electric Engineering, Catholic University of Rio de Janeiro, Rio de Janeiro, Brazil mmauro.monteiro@gmail.com raul@ele.puc-rio.br darioaugusto@gmail.com Keywords: 3D, medical imaging, liver segmentation, computed tomography, virtual liver surgery. Abstract:In this paper the authors review the presently used 3D reconstruction techniques and compare their prototype with the existing methods of liver image 3D segmentation. It consists of an algorithm to segment the liver structures on computed tomography (CT) images according to the Couinaud orientation. This method method firstly separates the liver from the rest of the image. Then it segments the vessels inside the liver area using a region growing technique combined with hysteresis thresholding. It separates the vessels in segments without any bifurcation, and using heuristics based on anatomy, it classifies