Query Processing in Connectivity-Challenged Environments
This research addresses the challenge of query processing in environments with limited connectivity, focusing on Unmanned Aerial Vehicles (UAVs). Traditional methods, used in centralized and distributed database management systems (DBMS), do not adequately address bandwidth and quality-of-service issues in such settings. We propose a novel architecture for task management and continuous query processing among heterogeneous nodes, including UAVs, sensors, and ground controllers. Our approach emphasizes dynamic plan generation, resource management, and real-time support while considering the unique constraints imposed by mobility and disconnections.

Query Processing in Connectivity-Challenged Environments
E N D
Presentation Transcript
Query Processing in Connectivity-Challenged Environments Priyanka Puri Sharma Chakravarthy Gururaj Poornima Mohan Kumar Information Technology Laboratory Computer Science and Engineering Department The University of Texas at Arlington, Arlington, TX 76009 Email: sharma@cse.uta.edu URL: http://itlab.uta.edu/sharma
This effort is supported by AFRL under Contract Number: FA8750-09-2-0199 • Sanjay Madria and Raytheon (Waseem Naqvi) are also involved in this project Sharma: AF Mobility Workshop
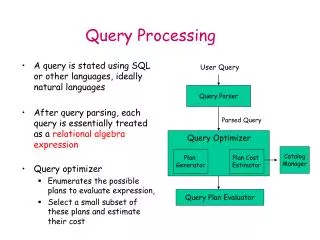
Query Processing • Has been addressed in the context of centralized DBMSs • Has been addressed in the context of distributed DBMSs • Cost-based plan generation is typically used • So, is there anything more/new to do? Sharma: AF Mobility Workshop
UAV 2 UAV 4 UAV 3 Ground Controller 2 UAV 1 UAV 5 Ground Controller 1 Ground Controller n Sharma: AF Mobility Workshop
UAV 6 UAV 2 UAV 3 Ground Controller 2 UAV 1 UAV 5 Ground Controller 1 Ground Controller n Sharma: AF Mobility Workshop
Currently • Data is dumped into a central server and queried • Bandwidth, QoS issues are not addressed • No collaboration among nodes • No continuous query processing, notification, fusion, context usage, and real- or near real-time support Sharma: AF Mobility Workshop
Proposed long-term Architecture Limited Resources Mobility Heterogeneity Disconnections Network of computing nodes: Unmanned vehicles, Sensors, Robots, PCs , Servers, Ground Controlling devices Queries, Tasks, Requests, Continuous Queries Publish/Subscribe SOA Distributed Middleware Task planning Join computation Composition pub/sub Context-aware Notification Resource Management Data management Context/ Knowledge Base Fault Tolerance Services Query Capability Publish Subscribe Capability Local fusion/Materialization Raw Data / fused data /data from other nodes Sharma: AF Mobility Workshop
Query Processing Sharma: AF Mobility Workshop
MyObjects Table at each node Cardinality (number of tuples) , Selectivity, replication site of data are known (part of meta data) Sharma: AF Mobility Workshop
Query Plan Format Sharma: AF Mobility Workshop
Operations in Plan format Sharma: AF Mobility Workshop
Plan using Semijoin chains R1 [1000] R2 [5000] R3 [3000] 1 2 SELECT c1 R1 MOVE R11 To Site2 SELECT c2 R2 SJ R11 R21 : J1 MOVE J1 To Site3 SELECT c3 R3 SJ J1 R31 : J2 MOVE J2 To Site2 SJ J2 R21 : J3 MOVE J3 To Site1 SJ J3 R11 : J4 COPY R To Site7 :J Total Cost= 14720 + 32000 = 46720 3 select project select project select project R21[3000] [lat] R11[800] R31[600] [long] J1[1200] J2[240] Cost=3200 Cost=4800 [long,nodeid] 7 Cost=1920 J3[1200] [lat,nodeid] Cost=4800 J4[320] J Cost=32000 Sharma: AF Mobility Workshop
Semi-join/join plan generation • We are developing algorithms for generating the plan space and pruning it for generating “best” (or “good”) plan for each input query (expressed as a join query) • It is a cost-based algorithm based on System R and SDD approaches extended to include connectivity and bandwidth issues • The complexity of plan generation is kn ; n is number of joins and k is the number of alternatives for each join. • Assuming less than 5 joins in a query • Integrate replication into the algorithm Sharma: AF Mobility Workshop
Plan Generation Alternatives • A Query Plan (QP) is a numbered sequence of operations for executing a Query • A QP includes how data is moved as part of execution • Plan generation alternatives • Static Plan: generated once and executed in a distributed manner • Dynamic plan: generated incrementally at each node as the query progresses using current connectivity information • Parallel plan: partial plans are executed in parallel • Interactive plan: get some estimate by asking nodes that has relevant data Sharma: AF Mobility Workshop
Static plan • The physical plan generated will have node information for data propagation. • This will be mapped to “actual connectivity” by the physical layer for execution • It is possible that no connectivity exists by the time execution is performed for a generated query plan • In that case, either a new plan can be generated (using the same algorithm, but using current meta data) or an alternative approach can be used to incrementally modify the plan Sharma: AF Mobility Workshop
Dynamic plan • Generate plan for the first join and defer the rest of the plan • Join plans are generated one at a time • Current connectivity information can be used • Result size estimation will also be more accurate • Query execution and (partial) plan generation are intertwined • Does not increase the complexity of plan generation or plan execution (compared to static) Sharma: AF Mobility Workshop
Parallel plan • All local operations/computations (select, project, and even some joins) can be done in parallel • Join plans are still generated one at a time • Increases message/information exchange • Current connectivity information can be used • Result size estimation will also be more accurate • Deal with responses and plan generation and execution may be slightly more complicated than the previous cases Sharma: AF Mobility Workshop
Interactive plan • When a query comes in, send out requests for local processing and get processing time and size information • Use the above to generate partial plans • Join plans are still generated using information obtained interactively • Increases message/information exchange • Current connectivity information can be used • Result size estimation will also be more accurate • Combines Dynamic and parallel execution in an interactive manner Sharma: AF Mobility Workshop
Replication Issues • Algorithm for Replication • Single copy replication that “minimizes” the data transmission cost and “maximizes” the number of paths (to deal with connectivity) • Algorithm for Replication utilization • Given a replication, determine the utility of that replica in terms of query evaluation cost for a reasonable load • Reconcile the above two to come up with a replication strategy that balances the competing tradeoffs Sharma: AF Mobility Workshop
Thank You ! Sharma: AF Mobility Workshop