Download
1 / 28
280 likes | 446 Views
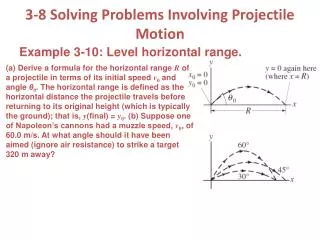
Solving Inverse Design Problems Involving Radiant Enclosures through Gradient-Based Optimization. K. J. Daun, J. R. Howell, and D. P. Morton Department of Mechanical Engineering The University of Texas at Austin. Radiant Enclosure Design Problems.

E N D
Solving Inverse Design Problems Involving Radiant Enclosures through Gradient-Based Optimization K. J. Daun, J. R. Howell, and D. P. Morton Department of Mechanical Engineering The University of Texas at Austin
Radiant Enclosure Design Problems • Radiant enclosure design problems are encountered in diverse industrial settings • Examples: • Paint drying in the automotive industry • Baking ovens in the food industry • RTP of semiconductor wafers • Optimal geometry of solar collector-concentrators
General Form of the Design Problem Heater Surface qs = ? qs = ? • Enclosure contains a heater surface and a design surface • Goal is to find the enclosure geometry and heater settings that produces the desired qs and T over the design surface • In order for the problem to be well-posed, only one BC can be specified on each surface! • Can be solved using forward, inverse, or optimization design methodologies qs = ? qs = ? qs = ? qs = ? Design Surface qsDS, TDS are known
Forward Design Methodology • Either TDS or qsDS is specified over each surface • Assume TDSis specified over the design surface • The designer • Guesses heater settings and enclosure geometry • Calculates qsover the design surface • Adjusts design and repeats analysis if necessary • Requires many iterations, and the final solution quality is limited
Inverse Design Methodology • Both TDSand qsDS are specified over the design surface, while the heater settings are unspecified • The inverse design problem is in its explicit form, which is ill-posed • The resulting set of ill-conditioned equations, Ax = b, must be solved using regularization methods • Finds a solution in few iterations, but it is often non-physical • This method is only applicable to certain types of enclosure design problems
Optimization Design Methodology • TDS is specified over the design surface • Define an objective function, F(F), and design parameters, F, that control enclosure geometry and heater settings • Optimal design is found by minimizing F(F), usually through gradient-based minimization • Much more efficient than forward “trial-and-error” method • Easy to implement design constraints by restricting the domain of F
Gradient-Based Minimization • Objective function local minimum is found iteratively • At the kth step: • Check if Fk = F*, usually by checking if |F(Fk)| < ecrit • Choose search direction, pk • Choose step size, ak,usually by minimizing f(ak) = F(Fk+akpk) • Take a step, Fk+1 = Fk + akpk
Gradient-Based Minimization • Search direction is chosen based on 1st and 2nd-order curvature at F(Fk): • Search direction choices:
Classes of Enclosure Design Problems Heater Surface q1= ? q2= ? q3= ? q4= ? q5= ? q1 = ? q2 = ? q3 = ? q4 = ? Design Surface T = Tspec, q = qspec Design Surface T = Tspec, qs = qspec Heater Surface q1= ? q4(t)= ? q1(t)= ? q2(t)= ? q3(t)= ? q5(t)= ? q2= ? Heater Surface q3= ? q4= ? q5= ? V Design Surface T = Tspec, q = qspec Design Surface T(t) = Tspec, q(t) = qspec
Inverse Boundary Condition Design Heater Surface qs= ? qs= ? qs= ? qs= ? qs= ? Design Surface T = Tspec, qs = qspec • Goal is to find heat flux distribution over the heater surface • Enclosure geometry is fixed • Solved using both inverse and optimization design methodologies • Inverse design methodologies by Oguma and Howell (1995), Harutunian et al. (1995) • Optimization design methodology by Daun et al. (2003)
Governing Radiosity Equations = + Radiosity Emitted Radiation Reflected Incident Radiation = + Incoming Energy Outgoing Energy
Solution of Governing Equations • Calculating F(F) and 2F(F) requires 1st- and 2nd-order heat flux sensitivity, e.g. • Radiosity sensitivities are solved by post-processing the radiosity solution • Solve Ax = b, xi = qoi(F) • Solve Ax = b, xi = qoi(F)/Fp • Solve Ax = b, xi = 2qoi(F)/FpFq • Heat flux sensitivities are found from radiosity sensitivities
Example Problem: Inverse BC Design F9 F10 F11 F12 F12 F11 F10 F9 F8 F8 F7 F7 Heater Surface e = 0.9 F6 F6 F5 F5 F4 F4 Design Surface qstarget = 2 W/m2 Eb = 1 W/m2 e = 0.5 F3 F3 F2 F2 F1 F1 qs = 0W/m2 qs = 0W/m2
Example Problem: Inverse BC Design 12 sT4(u) [W/m2] 10 8 F9 F9 6 F1 F1 4 F4 F4 F3 F3 2 0 0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5 0.55 0.6 u
Example Problem: Inverse BC Design 2 sT4(u) [W/m2] (specified) 1.5 1 0.5 0 -0.5 -1 qs(u, F*) [W/m2] -1.5 -2 -2.5 -3 0.95 0.65 0.7 0.75 0.8 0.85 0.9 0.95 u
Optimization of Transient Problems Heater Surface q5(t)= ? q4(t)= ? q1(t)= ? q2(t)= ? q3(t)= ? V Design Surface T(t) = Tspec(t), q(t) = qspec(t) • Solved using: • Gradient-based optimization (Fedorov et al., 1998) • Inverse design methodology (Ertürk et al., 2001) • Nonlinear controls with regularization (Gwak and Masada, 2002)
Governing Equations d(u) + = - Stored Energy Incoming Energy Outgoing Energy • Enclosure surface discretized into N elements, and time domain discretized into Nt time steps • Results in a non-linear system of equations that must be solved at each time step
Transient Optimization • Objective function is defined as • Heater settings are controlled by cubic splines, where t = t/tmax. • Objective function sensitivities found analytically, through direct differentiation
Example Problem: Transient Optimization 1 2 3 4 5 6 7 8 Heater surface T1 = 300 K e1= 1 T2 = 1000 K e2 = 1 Design surface Refractory surface V t =0 t =1
Example Problem: Transient Optimization 1 3 4 5 6 7 8 2 1 0.9 0.8 0.7 0.6 qs(F)/sT24 0.5 0.4 0.3 0.2 0.1 0 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 t
Example Problem: Transient Optimization 1.2 x = 0 x = 1 1 Design Surface x = 1 0.8 Target T(F, t)/Ts 0.6 x = 0 0.4 0.2 0 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 t
Geometric Optimization F2 F1 qs(F3) qs(F4) Heater Surface qs(F5) qs(F6) qs(F7) Design Surface T = Tspec, q = qspec • Both heater settings and geometry can be designed • Only optimization methods have been used • Deterministic optimization for diffuse-gray enclosures (infinitesimal-area method) • Stochastic optimization for enclosures with specular surfaces (Monte Carlo method)
Enclosures Containing Specular Surfaces ` • The exchange factor, Fji, is estimated using Monte Carlo analysis: • The uncertainty in Fji induces a random error in qs(F) and F(F) Energy in from other sources Energy leaving by emission Energy in from surrounding surfaces – = = -
Stochastic Optimization • Uses Kiefer-Wolfowitz scheme based on steepest-descent, used when an unbiased estimate of F(F) is unavailable • At the kth iteration, • Check if Fk = F* • Set • Set ak = a0/ka, 0 a 1 • Fk+1 = Fk + akpk • The gradient is estimated by central finite difference, with
Example Problem: Geometric Optimization F2 Specular Surface qs3 = 0 W/m2 r3 = 1 F1 Specular Surface qs2 = 0 W/m2 r2 = 1 Heater Surface qs1 = 1 W/m2 e1 = 1 u Design Surface Eb4 = 0 W/m2, qstarget = -1 W/m2, e4 = 1
Example Problem: Geometric Optimization F2 F1 F2 F1 Initial Enclosure Geometry Minimization Path Optimal Enclosure Geometry
Example Problem: Geometric Optimization qs(u, F0) (initial) qs(u, F*) (optimal)
Conclusions • Optimization is used to design many types of radiant enclosures • Solves the inverse design problem implicitly, through iteration • More efficient than the forward design method, and usually produces better solutions • More straightforward than inverse design (regularization) method, and easier to implement design constraints