Download
1 / 17
180 likes | 334 Views
On The Move Pop-Up Target Detection Phase 2. Client: NVESD 2006 ROM Estimate: $1M. Improve situational awareness for armored patrol in urban terrain Provide operator with continuous 360° view in closed hatch environment Transition to DAS ATO.

E N D
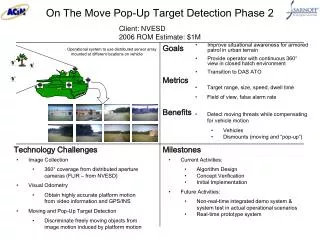
On The Move Pop-Up Target Detection Phase 2 Client: NVESD 2006 ROM Estimate: $1M • Improve situational awareness for armored patrol in urban terrain • Provide operator with continuous 360° view in closed hatch environment • Transition to DAS ATO Operational system to use distributed sensor array mounted at different locations on vehicle • Target range, size, speed, dwell time • Field of view, false alarm rate • Detect moving threats while compensating for vehicle motion • Vehicles • Dismounts (moving and “pop-up”) • Image Collection • 360° coverage from distributed aperture cameras (FLIR – from NVESD) • Visual Odometry • Obtain highly accurate platform motion from video information and GPS/INS • Moving and Pop-Up Target Detection • Discriminate freely moving objects from image motion induced by platform motion • Current Activities: • Algorithm Design • Concept Verification • Initial Implementation • Future Activities: • Non-real-time integrated demo system & system test in actual operational scenarios • Real-time prototype system
Client: NVESD 2006 ROM Estimate: TBD Real Time Change Detection Phase 2 • Build IED Detection System for transition to Eagle Eye Platform • Demonstrate using Eagle Eye data type • Provide system to be used for field testing • Processing speed (min/KM) • Detections/False alarms for baseline test sequence • Faster reaction time • Automation enables either doing more change detection analyses with the same staff or to reducing the staff needed to do manual analysis. • Turn prototype into product • Adapt for Eagle Eye data type and optimize performance for this platform • Speed up algorithms to reduce analysis time and hardware requirements • Add advance processing to minimize the number of false alarms the operator needs to sort through • Establish compatibility with Eagle Eye data type • Establish baseline for quantitative testing • Field testing cycle 1 • Release of optimized algorithms and GUI • Field testing cycle 2 • Deliver Sarnoff IED Detection System to NVL
Future Force Battle Command and Control Integration and Experimentation (F2BC2IE) Phase 2 Client: C2D 2006 ROM Estimate: TBD Goals Metrics Benefits • Enhance Analysis Environment to support integration and experimentation with protocols used among UA, UE, and Joint/Coalition forces • Transition to NEBC ATO, F2BC2 • Delay and throughput performance of network protocols • Traffic loading of networks • Provide information, based on realistic integration and experimentation events, to increase ability to design and implement FCS systems for optimal performance Technology Challenges Milestones • Interoperability of protocols within FCS and between FCS and Joint/Coalition forces • Optimal configuration and performance of network protocols and services in FCS • Multiple communications networks used in FCS to integrate a Unit of Action (UA) with a Unit of Employment (UE) • New network protocols and services • Applications with new software architectures • Analysis Environment v2.0, in partnership with C2D, using SOSCOE and CPOF systems • FCS traffic model, in partnership with ASEO • Robust interoperability of Service Discovery protocols • Robust interoperability of C2 applications and related data • Experiments with BCBL, Ft. Leavenworth
RFID card Surveillance and Area Security System Phase 3: Infrastructure Deployment Potential Clients: STCD, CERDC HLS Office 2006 ROM Estimate: TBD Deploy the current SASSI prototype system in an operational environment. Integrate relevant sensors for the application space and consolidate control and event monitoring within one interface. Optimized system performance for surveillance and perimeter security for a real-world application. Robust components within ad hoc sensor network. Rapid deployment and configuration of a surveillance and perimeter security scenario. Improvement over traditional security systems which require intensive infrastructure development. Typical SASSI Infrastructure • Robust, self-organizing, self-healing network nodes • Ease of deployment • Low maintenance • Low power requirements • High transmit power • Interference mitigation • Quality of Service, authentication, encryption • Standard interface to sensors • Robust ad hoc sensor network • Accuracy from relevant sensors • Integration of sensor event data • Control of sensors from single user interface • Realistic battery life • Realistic transmit range • Rapid deployment and setup • Intuitive interface and operation
GPS AIR-GROUND UNMANNED SYSTEM COLLABORATION Phase 2 Client: C2D 2006 ROM Estimate: TBD • To design, prototype and evaluate algorithms/ architectures for collaboration of multiple unmanned system of sensors (UAV/UGV/UGS) • Transition to C2ORE ATO • Track length and ID accuracy in target tracking • Duration and speed for autonomous navigation • Bandwidth for control of collaborating vehicles. • Low latency Situational Awareness from multiple platforms • Coordinated action of multiple UVs • Provide lessons learned to support C2ORE ATO • Provide support to C2ORE ATO deliverables • Algorithm and architecture enhancement based on decentralized configuration to improve bandwidth in collaboration activities. • Demonstrate the mission achievability improvement among UGV, UGS and/or UAV. • Technology transfer to CERDEC for evaluation and feedback. • FY07: Dynamic course of action planning toward C2ORE ATO Experiment #1 • FY08: Autonomous navigation and path planning among collaborative UAVs and UGVs for C2ORE ATO. • Fusion of tracks from various collaborating vehicles – unattended ground sensors, ground vehicles and/or air vehicles. • Challenge of coordinating multiple vehicles. • To combine visual, GPS/INS, acoustic etc information • Improve effectiveness of sensors toward goal • Speed navigation and robustness of MTI • Efficient/robust network to support active collaboration, despite individual node failure
Client: STCD 2006 ROM Estimate: TBD Cluster 5 HPA LRU Phase 2Form Fit Function Prototype Development • Develop 20W High-Power-Amplifiers (HPA) as Form-Fit-Function (FFF) Line-Replaceable-Units (LRU) for JTRS Manpack, SFF-J and G Radios. • Transition to RETNA ATO, JTRS • HPA must meet efficiency, linearity, and volume requirements of JTRS Cluster 5 radios. • Sarnoff’s SiC-based Class B Push-Pull amplifiers enable higher efficiency while meeting linearity requirements, thereby reducing the DC prime power, heat sink, and volume of the radios. • Achieving high efficiency over broad bandwidths (30 – 2800 MHz). SiC devices provide good performance (power, gain, and stability) over broad bandwidths. • Reducing circuit volume within the 5” (L) X 3.5” (W) X 1.5” (H) envelope for HPA LRU. • Reducing heat dissipation and heat sink volume, while maintaining safe operating temperature for personnel. • FFF Design, Successful PDR • HPA FFF LRUs Fabrication: Qty. 5 • HPA LRU Testing to JTRS Specifications • Successful Integration to JTRS Radio Sets • Field Tests and Demonstrations
Client: STCD 2006 ROM Estimate: TBD Multi-Band SOTM Terminal Develop a multi-band satcom-on-the-move (SOTM) ground terminal that delivers 256 kbps or more for the US Army. Support data rate of 256 kbps or more, while on-the-move on cross-country terrain. Sarnoff’s SOTM terminal will enable the Warfighter to be connected in a network-centric fashion to the global-information-grid (GIG) while deployed to the most forward combat locations. Leverage previously developed gimbal positioner. • Maintaining adequate link to the satellite while the vehicle is moving rapidly on cross-country terrain. Mitigating blockage effects, especially for a future IP-based network. • Reducing size of antenna superstructure to minimize target size. • Compressed development time i.e, 8-months. • Design completion, successful PDR • Rapid fabrication, prototyping. • Integration and testing. • Field Tests and Demonstrations
Client: STCD 2006 ROM Estimate: TBD Q-Band Antenna-Mounted SSPA Develop 10W and 25 W Q-band Solid-State-Power-Amplifiers (SSPA) using GaN Power Devices for Satcom Ground Terminals. SSPA must meet efficiency (> 15%), linearity (IMD < 25 dBc), and volume (< 200 in3) requirements for antenna-mounted SSPAs. Sarnoff’s SSPA will enable US Army to achieve higher data rates with small satcom ground terminals that address AEHF & TSAT satellites. • Development of GaN devices at Q-band. GaN devices promise exceptional power density and gain, while operating at very high junction temperatures. • Q-Band power combiner for combining multiple GaN power devices. • Achieving small size by reducing heat sink volume, while allowing out-door operation. • Development: 2W GaN Power Device. • Development: Q-Band Power Combiner. • Development: Heat Sink. • SSPA: Integration and Lab Testing. • SSPA: Field Testing and demonstration.
Embedded SDR RadioLight Weight, Low Power for UAVs Potential Client: STCD 2006 ROM Estimate: TBD Develop a Production Ready Software Defined Radio (SDR) from Working Lab Bench Implementation for Light Weight UAV Applications. Develop Requirements with Customer and Produce Field-able Radio System. - Size, Weight, and Power (SWaP) plus Low Cost by Leveraging COTS Components • Low Power, Low Cost Embedded SDR • JTRS Compatible • - SCA Compliant Architecture • System Foundations • (Existing) • Physical Layer Simulation Platform (Sarnoff Investment) • Novel, Efficient RF Architecture (Sarnoff Investment) • Efficient Baseband Architecture (ACIN) • Partial Soldier Radio Waveform Implementation (ACIN) • Successful Over the Air Test (ACIN) • Define Requirements with End User • Spin Hardware Designs • Target Final Form Factor • Add New Features to Waveform • Physical Layer and MAC • Radio System Integration • Radio System Test • UAV System Integration • UAV Field Test • Manufacture
Potential Clients: DARPA, I2WD, CERDEC HLS 2006 ROM Estimate: TBD Video Data Mining for Vehicle Behavior Alerts in a Large Area Security System Enable vehicle make/model, fingerprint based alerts/alarms Enable vehicle make/model, fingerprint and spatio-temporal behavior based alert alarms Discover patterns of behavior of specific vehicles and vehicle types in a large area surveillance system Accuracy of associating patterns of spatio-temporal activity with specific vehicles and vehicle types Accuracy of detecting user-specified alert & alarm patterns based on vehicle ID and spatio-temporal behavior High performance force multiplier Highly effective predictive and preventive security & surveillance tool Orders of magnitude increase in effectiveness of human-in-the-loop security & surveillance operations • High accuracy classification of vehicle types amongst video tracks of millions of vehicles • Near-real time operation for in-time use of preventive, predictive and forensics capabilities • Building indexing, analysis and data mining mechanisms for real-time video track data • Efficient representations of vehicle video tracks for efficiently discovering similarities and differences under a variety of illumination, aspect and camera pose configurations • Demonstrate vehicle make/model classification using vehicle video track data derived from the Ft. Belvoir CZTS testbed • Demonstrate extraction of spatio-temporal behavior patterns of specific vehicles and vehicle types • Demonstrate user-defined alert and query mechanisms based on spatio-temporal behavior of vehicles • Demonstrate vehicle specific motion pattern analysis capabilities with normal/anomalous patterns and link discoveries Current Capabilities • Wide area 24/7 vehicle tracking based on cameras at intersections. • Kinematics & Coarse appearance based matching of vehicles • Scalable infrastructure to integrate hundreds of cameras and processors
Potential Clients: NVESD, I2WD, C2D 2006 ROM Estimate: TBD Rapidly Creating and Maintaining 3D Virtual Models of Large Urban Warfare Zones using LIDAR Data • Automatically create textured 3D models of urban areas using aerial and ground LIDAR data. • Automatically detect features such as doors, windows, alleys, etc. • Enable querying of annotated features. • Keep a 3D model current by detecting changes and updating the 3D model using LIDAR data Textured 3D model Lidar Data • Accuracy of 3D models (comparable to reality) • Accuracy of change detection and model update • Accuracy of detection of features such a doors, windows, etc. Aerial Image/Lidar Ground Image/Lidar + • Automatic geo-specific 3D model construction and maintenance • Highly accurate 3D model for use in simulation and training applications, mission rehearsals, threat analysis, etc. • Construction of ground LIDAR collection platform • Fusion of aerial and ground LIDAR • Building detection, indexing, and querying mechanisms for features such as doors, windows, alleyways, etc. • Detection and classification of changes in the 3D model as new LIDAR data become available • Demonstrate instrumentation of ground LIDAR collection platform • Demonstrate fusion of ground and aerial LIDAR • Demonstrate creation of 3D model with façade details • Demonstrate updating of 3D model when new LIDAR data is made available • Demonstration of automatic feature detection (doors, windows, alleys, etc). Current Capabilities • Rapidly create geo-specific 3D models of indoor/outdoor scenes from aerial LIDAR and digital photographs • Semi-automatic 3D model creation with minimum user interaction • Aerial Lidar Modeling time reduced from Weeks to hours (compared to conventional methods) • 3D Models deployed in security and surveillance applications
Potential Clients: DARPA, NVESD, I2WD 2006 ROM Estimate: TBD Vehicle Fingerprinting for Stand-off Security under Vehicle-based IED Threats Enable vehicle identification and people count estimates at stand-off distances for threat mitigation Enable vehicle deadweight estimation for assessment of IED threat Accuracy of vehicle make-model identification Accuracy of vehicle fingerprinting Accuracy of people counting Accuracy of vehicle / people weight estimates Occupant Count Make/Model Back, Side and Front High Resolution Cameras Expected Weight Underground Scale => Weight Force Protection Force Multiplier Threat assessment at safe distances Underbody Scan 3D Lidar • High accuracy vehicle make-model identification with a large database of vehicles • High accuracy vehicle fingerprinting under variable illumination and other environmental conditions • High accuracy people count estimation • Real-time operation • System design and implementation for high accuracy assessment of anomalies in weight and other aspects FY07 FY08 FY06 FY09 TASKS Lidar Based Identification, Occupant count, System Demonstration Underbody + Front, Side, Back salient features based verification, System Demonstration Real time system and transition to Army
Communications for Subterranean and Urban Environments Phase 3 Client: STCD 2006 ROM Estimate: TBD • Self-contained, man-portable, deployable communication relays and hands-free voice and data communication PDA terminals • Advance the ACIN CSUE Voice and Data communication system along a path toward productization • Support for platoon-level communication needs in operational environments (~100 handsets/relays) • Improved tactical communications in restrictive environments • System positioned for continued development support by the operational user community Voice and data communications for warfighters and rescue workers operating in restrictive subterranean and urban environments. • Leverage Sarnoff investment for system improvements based upon lessons learned in June 2005 Ft Benning evaluation. • Improved ruggedization of hands-free voice and data communication PDAs and deployable relay nodes • Identification of suitable operational end-user community for continued funding and targeted product refinements • Scalable operation support larger numbers of handsets and relays • Field Tests and Demonstrations • Adapting COTS hardware/software components for use in ruggedized military system • Increasing scalability of multihop mobile ad hoc networking protocol while maintaining optimized performance in highly mobile environment • Optimization of voice communications in error-prone wireless environments • Incorporation of emerging consumer radio technologies to improve system size, weight, power consumption and performance
3/4” Small Form Factor Relay for Ad Hoc Networking Client: STCD 2006 ROM Estimate: TBD • Small form factor, low power, low cost, disposable deployable ad hoc repeater node • Interoperability with ACIN CSUE system 1/2” 1.0” 2” • Drastic reduction of relay node size, weight and power consumption • Small form factor, low power, low cost, disposable deployable ad hoc repeater node • Interoperability with ACIN CSUE system 5” 3.5” • Improved tactical communications in restrictive urban and subterranean environments • Greatly improved operational deployment and use: throw down, stick on, use and leave-behind Small form factor relay node supporting deployable mobile ad hoc communication infrastructures • Use of commodity consumer components to reduce the Size, Weight and Power (SWAP) and price of communication nodes • Adapting COTS radio components for use in military communication system applications • Incorporation of ad hoc network protocol directly into the controller of the radio • Hostless operation allowing radio to function as a stand-alone repeater without requiring a costly control computer • Identification of target radio platform • Incorporation of ad hoc networking protocol onto radio platform • Design and build bootstrap/control hardware to enable hostless operation • CSUE interoperability demonstration
MIMO-Enhanced Ad Hoc Relay Node Client: STCD 2006 ROM Estimate: TBD • Incorporate COTS Multiple-Input Multiple-Output (MIMO) smart antennas into deployable ad hoc relay nodes to enable robust communication in restrictive urban and subterranean environments • Interoperability with ACIN CSUE system • Improvement in communication rate, range and robustness with minor cost/size penalties • Improved tactical communications in restrictive urban and subterranean environments • Greatly improved operational deployment characteristics (e.g node placement, multipath tolerance, etc.) Leverage consumer and commercial MIMO technologies to enhance radio communications in restrictive environments • Use of commodity consumer-oriented MIMO and Smart Antenna components in existing communication system • Adapting COTS radio components for use in military communication system applications • Integration of ad hoc network protocol with MIMO antenna controller to support optimized networking operations in mobile environments • Identification of target commercial MIMO and Smart Antenna Controller platform • Design and implementation of Ad Hoc networking protocol modifications and interface to antenna controller • Incorporation of MIMO antenna controller into current or next-generation (small form factor) CSUE relay nodes • CSUE interoperability demonstration
Iris Recognition on the Move Potential Client: CERDEC HLS 2006 ROM Estimate: TBD Utilize information from alternate sensors to control a Pan-Tilt-Zoom (PTZ) camera allowing an adequate iris image to be captured to perform recognition of subjects who are moving. PTZ Camera Recognition of enrolled subjects at a level equal to commercial iris recognition systems which operate on fixed subjects at close proximity. Identification Allows high probability identification of enrolled personnel at a facility without the need to dwell near a camera. Iris Recognition using PTZ camera • Coarse recognition of moving subject • Control of camera on moving subject • Adequate image quality from inexpensive camera • Adequate illumination sources • Prevention of “Failure to Acquire” • Capture of adequate iris images • Sufficient reduction in “Failure to Acquire” • Multi-subject trials • Recognition of persons at levels equal to commercial systems using close-proximity cameras
A System Model for Standoff Detection of IEDs using Spectral Unmixing Algorithms Potential Client: CERDEC HLS 2006 ROM Estimate: TBD • Establish feasibility of standoff detection of IEDs using THz spectroscopy by demonstrating spectral unmixing of an atmospherically cluttered spectrum • Develop requirements for system hardware • Compare predictions with actual spectral inputs to determine software functionality and unmixing algorithm performance • Probability of detection and false alarm rates vs. explosive, interferer, and noise levels Schematic of THz standoff detection system • The unmixing algorithm removes a critical barrier to standoff detection • Software will be applicable to a wide number of systems • THz standoff detection is applicable to widely vary scenarios ROC Atmospheric Broadening Standoff System Simulation Model • Demonstrate simulated broadened spectra of selected explosives at atmospheric pressure in the presence of O2, N2, and H2O • Calculate the link budget to demonstrate there is sufficient signal to noise to discern the spectral characteristics • Demonstrate that a cluttered target can be identified with a reasonable probability The system scans over the frequency range (200-400GHz) and measures signal absorption in the region between the transmitter and receivers The hardware challenge is to generate sufficient RF power that is tunable over the desired range This scan generates an atmospherically broadened spectral response curve A software challenge is to develop deconvolution and unmixing algorithms to sharpen the spectra and to give relative concentration of explosives Key challenge to be addressed: Atmospherically broadened, cluttered spectra lose much of their distinguishing information. Can they still be used to identify explosives with a very low false negative rate and a manageable false positive rate? Sarnoff Proprietary