Download
1 / 47
480 likes | 701 Views
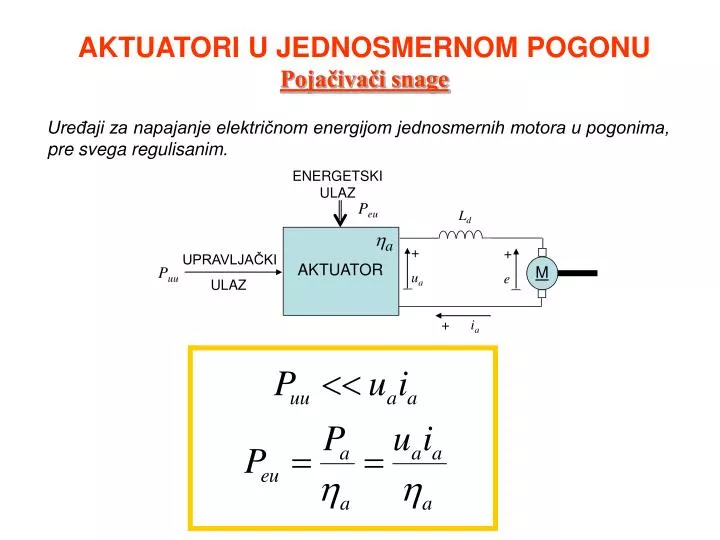
P eu. L d. + u a. + e. UPRAVLJAČKI. AKTUATOR. M. P uu. ULAZ. + i a. AKTUATORI U JEDNOSMERNOM POGONU Pojačivači snage. Uređaji za napajanje električnom energijom jednosmernih motora u pogonima, pre svega regulisanim. ENERGETSKI ULAZ.

E N D
Peu Ld + ua + e UPRAVLJAČKI AKTUATOR M Puu ULAZ +ia AKTUATORI U JEDNOSMERNOM POGONU Pojačivači snage Uređaji za napajanje električnom energijom jednosmernih motora u pogonima, pre svega regulisanim. ENERGETSKI ULAZ
Snaga na upravljačkom ulazu ima isključivo električnu prirodu. Napon uc – KOMANDNI NAPON, može biti znatno manji od napona ua. U najvećem broju slučajeva: gde je ka – konstanta pojačanja aktuatora. Snaga na energetskom ulazu može biti (u zavisnosti od vrste aktuatora) mehanička ili električna (u naizmeničnom ili jednosmernom obliku). Vrste aktuatora • Elektromehanički: • Generator jednosmernestruje • 2. Amplidin • Statički (konvertori) aktuatori • Ispravljači (AC/DC) • Čoperi (DC/DC) • Magnetni pojačivači
Ra La + + Rf Lf Nf mg, g=const. if e + G uf ua f ia + GENERATOR JEDNOSMERNE STRUJE “DINAMIČKI SISTEM” Jednačine Diferencijalne: Algebarske:
NORMALIZACIJA: • Sistem baznih vrednosti bira se u zavisnosti od toga: • da li je posmatrani dinamički sistem nezavisan, tada se bira isto kao kod motora; • ili • posmatrani aktuator je podsistem u nekom složenom sistemu, tada se mora voditi računa o kompatibilnosti baznih vrednosti u celom dinamičkom sistemu. Usvajanjem sledećih baznih vrednosti:
BLOK DIJAGRAM: N: if f -1() e + + 1 1 1 uf=uc ia + Ra pTf f pTa ωg ua Kod ovog aktuatora važi: Ako se zanemare gubici na trenje, ventilaciju i u gvožđu, važi: Vezu između ulaznog signala i izlaza aktuatora ovde nije moguće odrediti jednoznačno jer je sistem složen i nelinearan!!! Potrebno je aktuator integrisati u konkretandinamički sistem, naime odrediti relaciju ua (ia,?,t), zatim linearizovati model i tek tada se mogu određivati prenosne funkcije i pojačanja.
Vard Leonardova grupa M PM G Ua Uc=Uf
ISPRAVLJAČI Iz perspektive danas aktuelnih ispravljača za pogone sa jednosmernim motorom treba govoritisamo opoluprovodničkim ispravljačima,sa tiristorima i diodama, pri tome rešenja sa diodama, neregulisane ispravljače (samo diode) i poluupravljive ispravljače (razne kombinacije tiristora i dioda) treba samo pomenuti. Delimično ćemo proučiti, pre svega sa stanovišta elektromotornog pogona, dve vrste regulisanih ispravljača: - monofazni mosni ispravljač; - trofazni mosni ispravljač. Detaljno proučavanje ovih ispravljača radi se u okviru predmeta Energetski pretvarači.
Strukturna šema ispravljača: MREŽA Peu=V~I~ cos () SINHRONI-ZACIJA (“TESTERE”) GENERATOR OKIDNIH IMPULSA uc POJAČAVAČ IMPULSA TIRISTORSKI MOST JEDNOSMERNI IZLAZ (Pa;ua;ia) IMPULSI UGAO PALJENJA
Dijagram pretvaranja komandnog napona ucu ugao paljenja t uc max min uc max uc min 2 Pojačanje generatora impulsa:
Monofazni punoupravljivi most Sprega monofaznog mosta i jednosmernog motora ua Q1 Q4 ia vs if Np Ns Q2 Q3 QA A iA -~ + - + vAKA vAN iGB iB QB B -~ + N + - vAKB vBN ua La Ra ia -+ - + vR eL Ea ip is Ekvivalentna šema pomoću koje se može objasniti rad ovoga ispravljača iGA Analizom rada ovoga ispravljača može se utvrditi da postoji više različitih režima rada koji se mogu podeliti na dve osnovne grupe: - režime prekidnih struja, i - režime neprekidnih struja.
vBN vAN vAN Ea 2 t 0 3 iGA t 2 3 0 iGB 0 iA iA iB ia t 2 - 3 0 ua Ea 2 t 3 0 ip 0 2 3 Prekidni režimi v Male brzine, mala elektromotorna sila.
Za sve prekidne režime važe sledeće analitičke relacije: Jednačina naponske ravnoteže je:
čijim se rešavanjem dobija: gde je:
U prekidnom režimu važi: Rešavanjem ove jednačine po dobija se: Zbog svoje složenosti i transcendentne prirode ova jednačina se može rešiti samo numerički!!! Maksimalna vrednost za ugao je: - Granica prekidnog režima, posle koje nastaje neprekidni režim (sa kontinualnom strujom).
Srednja struja u prekidnom režimu je: ili Srednja vrednost ispravljenog (jednosmernog) napona je:
Zbog vremenski promenljive struje pri stalnom fluksu ima se i promenljiv momenat, njegova srednja vrednost je: Poslednji izraz predstavlja MEHANIČKU KARAKTERISTIKU u prekidnim režimima, koja je očigledno nelinearna.
v vBN vAN vAN Ea 2 t 3 0 (a) iGA t 0 2 3 (b) iGB t 2 3 0 (c) ia iA iB iA t 3 2 Ua 0 (d) vBN vAN vAN 2 t 3 0 (e) Režimi sa neprekidnim strujama Veće brzine i veliko operećenje.
Analitičke relacije koje važe u režimu neprekidnih struja. Srednja vrednost ispravljenog napona je: Takođe važi i relacija: Sada se može izvesti statička karakteristika: Dok je MEHANIČKA KARAKTERISTIKA linearna i glasi:
1000 [o/min] 800 Granica prekidnosti Ld=0 Memin 600 o neprekidni režim 0 400 30 45 200 60 Me 60 75 40 20 30 prekidni režim 90 -200 105 -400 120 135 -600 150 180 -800
Prenosna funkcija mosta Most je nelinearan sistem! Pojačanje se određuje linearizacijom.
U dinamičkim režimima most unosi transportno kašnjenje, međutim, zbog pojednostavljenja analize most se može predstaviti kao član sa kašnjenjem prvog reda: Gde je: Td– srednje vreme kašnjenja koje je za monofazni most napajan iz naizmenične mreže sa 50Hz: Promena ugla paljenja se može dogoditi bilo kada, dok promena napona nastaje tek nakon uključenja odgovarajućeg tiristora. ua 2 1 Ua2 Ua1 0 1 2 3 4 Td
Ukupno pojačanje ispravljača U praksi je: Prenosna funkcija ispravljača:
a isa ia - + van Q1 Q3 Q5 iG1 iG5 iG3 isb b i1 i5 i3 ua n - + vbn i2 i6 i4 iG2 iG6 iG4 isc Q4 Q2 Q6 - + c vcn Trofazni tiristorski most Ova konfiguracija ispravljača danas se najčešće koristi u praksi. Principijelna šema trofaznog mosta data je na slici.
v vca vab vbc t 2 0 • Kod ovog načina ispravljanja takođe postoje režimi sa prekidnom i neprekidnom strujom. • Režim PREKIDNIH STRUJA nećemo proučavati iz dva razloga: • zbog višefaznog ispravljanja ovaj režim se ne javljačesto; • analiza režima prekidnih struja je u principu ista kod svih vrsta ispravljanja.
v vcb vab vab vba vac vac vbc vca vcb Ea t 0 3 2 iG1 t 2 /3 0 3 iG2 t 2 3 0 iG3 t 2 3 0 iG4 t 2 3 0 iG5 t 3 2 0 iG6 t 3 2 0 ia i6 i2 i4 i5 i1 i5 i6 i1 i3 i4 i6 i3 i4 i1 i2 i5 i5 i6 t 3 0 2 ua vcb vab vbc vba vca vab vac vcb t 2 3 0 isa t 2 0 3 Režim neprekidnih strujaispravljački režim
vcb vab vab vba vac vac vbc vca vcb t 3 0 2 Ea iG1 t 2 3 0 /3 iG2 t 2 3 0 iG3 t 2 3 0 iG4 t 2 3 0 iG5 t 3 2 0 iG6 t 2 3 0 ia i4 i3 i1 i6 i5 i2 i3 i5 i4 i4 i5 i2 i1 i3 i6 i4 i3 t 2 3 0 ua t 3 2 0 vab Ea vcb vbc vab vcb vbc vba vca vca isa t 2 3 0 Režim neprekidnih struja, invertorski režim v
Srednja struja je: Mehanička karakteristika, koja je linearna je: Familije mehaničkih karakteristika za različite uglove paljenja date su na slici.
[o/min] 1500 =0o =30o =45o 1000 Granica prekida Ld=0 =60o Prekidni režim 500 =75o Menom Me[Nm] 250 200 150 100 50 0 =90o Neprekidni režim =105o -500 =120o -1000 =135o =150o =180o -1500
Pojačanje trofaznog mosta je: Srednje vreme kašnjenja:
ČETVOROKVADRANTNI POGON Važno je istaći da jedan punoupravljivi most obezbeđuje rad pogonu samo u dva kvadranta. Rad u četiri kvadranta može se ostvariti: - prevezivanjem jednog ispravljača, u slučajevima kada se ne zahteva brzi prelazak iz jedne u drugu poluravan; - antiparalelno povezivanje sa odvojenim upravljanjem (bez kružne struje), kod brzih prelazaka (najčešće u praksi); - antiparalelno povezivanje sa saglasnim upravljanjem (sa kružnom strujom), kod vrlo brzih prelazaka iz jedne u drugu poluravan. Kod rada sa kružnom strujom važi:
Ld 6x M uc TG IV- kvadratni rad sa preklopnikom
Lk Lk Lk Ld ia* M uc - LOG. TG ia isti hladnjak IV- kvadratni rad bez kružne struje (razdeljeno upravljanje)
C1 - ISP C2 - INV C1 - ISP C2 - INV me M C1 - INV C2 - ISP C1 - INV C2 - ISP IV- kvadratni rad sa kružnom strujom (saglasno upravljanje) • Za ostvarivanje bržih reversa i1 Lc C1 Ld ia C2 Lc i2
kružna struja (samo za 1=2=90o ) Dijagram trenutnih vrednosti napona
Vard Leonardova grupa M PM G Ua Uc=Uf
ČOPERI U ZAVISNOSTI U KOJIM KVADRANTIMA JE MOGUĆ RAD DELIMO IH NA KLASE: A,B,C, D i E
Ua Ua Ia 0 0 Ia Klasa A Klasa B Ua Ua Ia 0 0 Ia Klasa D Klasa C Ua Ia 0 Klasa E
ČOPER KLASE A (spuštač napona) Na slici je prikazana šema ovog čopera i dijagrami karakterističnih veličina u režimu prekidne struje (b) i režimu neprekidne struje (c). is Q1 vAK1 Ua La Ra iG1 ia - - + + V + - eL vR iD Ia Ea Ua + - D1 0 (a)
iG1 t tON 0 Tp ia t 0 ua V Ea t 0 (b) iG1 t tON 0 Tp ia Ia1 Ia2 iQ1= is iD1 t 0 ua V t tON Tp 0 (c)
is D2 La Ra ia - - + + iQ V + - eL vR + Q2 Ua Ea + - vAK2 iG2 (a) ČOPER KLASE B (podizač napona) Šema i dijagram karakterističnih veličina u režimu neprekidne struje je data na slici. Ua Ia 0
iG2 t Tp tON 0 ia t 0 Ia1 iQ2 iD2=is Ia2 vAK2 V t 0 is t 0
is iQ1 D2 Q1 Ua iD2 La Ra ia - - + + iG1 V + - eL vR iQ2 Ia Q2 D1 Ua Ea + - 0 iD1 iG2 ČOPER KLASE C Ovaj čoper omogućava rad u dva kvadranta i predstavlja kombinaciju prethodna dva. Šema i karakteristični dijagrami dati su na slici.
iG1 t tON Tp 0 iG2 t 0 ia Ia1 iQ1 iD1 t 0 Ia2 iD2 iQ2 ua V 0 is 0
is Q1 D2 Ua L R E io - - + + V iG1 + - eL vR + Q2 Ia Ua D1 0 iG2 ČOPER KLASE D Šema čopera:
is - Q1 D2 Q3 D4 vD Ra La Ea + ia - - + + V + - + - eL vR Q2 D1 D3 Q4 Ua ČOPER KLASE E Ua Kombinacija dva čopera klase C omogućava četvorokvadrantni rad. Šema čopera je na slici. Q1- Q4 - ON 0 Ia Q2- Q3 - ON
Savremeni elektromotorni pogon sa motorom jednosmerne struje napajanim iz čopera L Rk C Č M