
ICRA2009
2009 IEEE International Conference On Robotics and Automation Kobe, Japan, May 12-17, 2009. ICRA2009. Evaluation of a robot as embodied interface for Brain Computer Interface systems. F. Piccione, S. Silvoni I.R.C.C.S. San Camillo Venice, Italy. E. Menegatti , L. Tonin

ICRA2009
E N D
Presentation Transcript
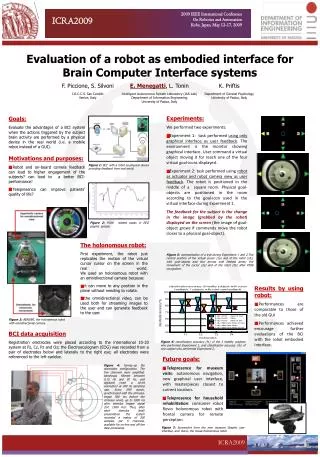
2009 IEEE International Conference On Robotics and Automation Kobe, Japan, May 12-17, 2009 ICRA2009 Evaluation of a robot as embodied interface for Brain Computer Interface systems F. Piccione, S. Silvoni I.R.C.C.S. San Camillo Venice, Italy E. Menegatti, L. Tonin Intelligent Autonomous System Laboratory (IAS-Lab) Department of Information Engineering University of Padua, Italy K. Priftis Department of General Psychology University of Padua, Italy • Experiments: • We performed two experiments: • Experiment 1: task performed using only graphical interface as user feedback. The environment is the monitor showing graphical interface. User command a virtual object moving it for reach one of the four virtual goal-icons displayed. • Experiment 2: task performed using robot as actuator and robot camera view as user feedback. The robot is positioned in the middle of a square room. Physical goal-objects are positioned in the room according to the goal-icon used in the virtual interface during Experiment 1. • The feedback for the subject is the change in the image (grabbed by the robot) displayed on the screen (the image of goal-object grows if commands move the robot closer to a physical goal-object). • Goals: • Evaluate the advantages of a BCI system when the actions triggered by the subject brain activity are performed by a physical device in the real world (i.e. a mobile robot instead of a GUI). • Motivations and purposes: • Robot and on-board camera feedback can lead to higher engagement of the subjects? can lead to a better BCI-performance? • Telepresence can improve patients’ quality of life? (1a) Figure 1: BCIwith a robot as physical device providing feedback from real world. (1b) Figure 2: P300 related peaks in EEG graphic sample. (2a) • The holonomous robot: • First experiment, the robot just replicates the motion of the virtual cursor cursor on the screen in the real world. We used an holonomous robot with an omnidirectional camera because: • it can move to any position in the plane without needing to rotate. • the omnidirectional video, can be used both for streaming images to the user and can generate feedback to the user. Figure 5: representation of a trial during Experiment 1 and 2.The central position of the virtual cursor (1a) and of the robot (1b), with goal-objects and four arrows with flashed arrow; the movement of the cursor (2a) and of the robot (2b) after P300 recognition. (2b) • Results by using robot: • Performances are comparable to those of the old GUI • Performances achieved encourage further evaluations of the BCI with the robot embodied interface. Figure 3: BENDER, the holonomous robot with omnidirectional camera. BCI data acquisition Registration electrodes were placed according to the international 10-20 system at Fz, Cz, Pz and Oz; the Electrooculogram (EOG) was recorded from a pair of electrodes below and laterally to the right eye; all electrodes were referenced to the left earlobe. Figure 6: classification accuracy (%) of the 5 healthy subjects who performed Experiment 1, and classification accuracy (%) of one subject who performed Experiment 2. • Future goals: • Telepresence for museum visits: autonomous navigation, new graphical user interface, with masterpieces closest to current location. • Telepresence for household rehabilitation: consumer robot Rovio holonomous robot with frontal camera for remote perception. Figure 4: Tuning–up the electrodes configuration. The five channels were amplified, band-pass filtered between 0.15 Hz and 30 Hz, and digitized (with a 16-bit resolution) at 200 Hz sampling rate. Every ERP epoch, synchronized with the stimulus, began 500 ms before the stimulus onset, up to 1000 ms after stimulus trigger signal (tot. 1500 ms). Thus, after each stimulus (trial) presentation the system recorded a matrix of 300 samples per 5 channels, available for on-line and off-line data processing. Figure 7: Screenshot from the new museum Graphic user interface, and Rovio, the house holonomous robot. ICRA2009