Download
1 / 25
250 likes | 367 Views
This study investigates parallel-server systems with dynamic affinity scheduling techniques for effective load balancing. The research emphasizes the importance of cache affinity and explores the key tradeoffs involved in serving customers optimally across various servers. An optimal dynamic threshold scheduling policy is proposed, featuring fluid and diffusion limits for performance analysis. The findings include a matrix-analytic approach and numerical experiments to determine the best settings for dynamic scheduling thresholds, alongside stochastic derivative-free optimization methods.

E N D
Mark S. Squillante Mathematical Sciences Department April 18, 2004 Analysis of Parallel-Server Systems with Dynamic Affinity Scheduling and Load Balancing
Problem Motivation Cache Affinity [SquillanteLazowska90]
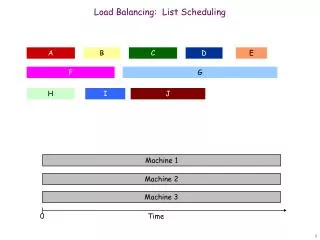
Problem Motivation Cache Affinity [SquillanteLazowska90] Key Points of Fundamental Tradeoff • Customers can be served on any server of a parallel-server queueing system • Each customer is served most efficiently on one the servers • Load imbalance among queues occurs due to stochastic properties of system
General Overview • Optimal Dynamic Threshold Scheduling Policy • Fluid limits • Diffusion limits • Analysis of Dynamic Threshold Scheduling • Consider generalized threshold scheduling policy • Matrix-analytic analysis and fix-point solution, asymptotically exact • Numerical experiments • Optimal settings of dynamic scheduling policy thresholds • Stochastic Derivative-Free Optimization
() 1 () P Scheduling Policy
() 1 () () P Scheduling Model
(1-ps) … … … 0,1,0 1,0,1 Tru,1,0 Tru+1,0,1 Tsu,1,0 Tsu+1,0,1 prg r r r … … … pr (1-pr)g s (1-ps) … … … 0,0,0 1,0,0 Tru,0,0 Tru+1,0,0 Tsu,0,0 Tsu+1,0,0 +r +r +r m m m (1-pr) Mathematical Analysis State Vector ( i, j, v ): • i: total number of customers waiting or receiving service at the processor of interest • j: number of customers in the process of being migrated to the processor of interest • v: K-bit vector denoting customer type of up to the first K customers at the processor
(1-ps) … … … 0,1,0 1,0,1 Tru,1,0 Tru+1,0,1 Tsu,1,0 Tsu+1,0,1 prg r r r … … … pr (1-pr)g s (1-ps) … … … 0,0,0 1,0,0 Tru,0,0 Tru+1,0,0 Tsu,0,0 Tsu+1,0,0 +r +r +r m m m (1-pr) Mathematical Analysis
(1-ps) … … … 0,1,0 1,0,1 Tru,1,0 Tru+1,0,1 Tsu,1,0 Tsu+1,0,1 prg r r r … … … pr (1-pr)g s (1-ps) … … … 0,0,0 1,0,0 Tru,0,0 Tru+1,0,0 Tsu,0,0 Tsu+1,0,0 +r +r +r m m m (1-pr) Mathematical Analysis
(1-ps) … … … 0,1,0 1,0,1 Tru,1,0 Tru+1,0,1 Tsu,1,0 Tsu+1,0,1 prg r r r … … … pr (1-pr)g s (1-ps) … … … 0,0,0 1,0,0 Tru,0,0 Tru+1,0,0 Tsu,0,0 Tsu+1,0,0 +r +r +r m m m (1-pr) Mathematical Analysis
(1-ps) … … … 0,1,0 1,0,1 Tru,1,0 Tru+1,0,1 Tsu,1,0 Tsu+1,0,1 prg r r r … … … pr (1-pr)g s (1-ps) … … … 0,0,0 1,0,0 Tru,0,0 Tru+1,0,0 Tsu,0,0 Tsu+1,0,0 +r +r +r m m m (1-pr) Mathematical Analysis
(1-ps) … … … 0,1,0 1,0,1 Tru,1,0 Tru+1,0,1 Tsu,1,0 Tsu+1,0,1 prg r r r … … … pr (1-pr)g s (1-ps) … … … 0,0,0 1,0,0 Tru,0,0 Tru+1,0,0 Tsu,0,0 Tsu+1,0,0 +r +r +r m m m (1-pr) Mathematical Analysis
(1-ps) … … … 0,1,0 1,0,1 Tru,1,0 Tru+1,0,1 Tsu,1,0 Tsu+1,0,1 prg r r r … … … pr (1-pr)g s (1-ps) … … … 0,0,0 1,0,0 Tru,0,0 Tru+1,0,0 Tsu,0,0 Tsu+1,0,0 +r +r +r m m m (1-pr) Mathematical Analysis Final Solution Obtained via Fix-Point Iteration • Initialize (ps, s, pr, r) • Compute stationary probability vector in terms of (ps, s, pr, r) • Compute new values of (ps, s, pr, r) in terms of stationary vector • Goto 2 until differences between iteration values are arbitrarily small
(1-ps) … … … 0,1,0 1,0,1 Tru,1,0 Tru+1,0,1 Tsu,1,0 Tsu+1,0,1 prg r r r … … … pr (1-pr)g s (1-ps) … … … 0,0,0 1,0,0 Tru,0,0 Tru+1,0,0 Tsu,0,0 Tsu+1,0,0 +r +r +r m m m (1-pr) Mathematical Analysis
(1-ps) … … … 0,1,0 1,0,1 Tru,1,0 Tru+1,0,1 Tsu,1,0 Tsu+1,0,1 prg r r r … … … pr (1-pr)g s (1-ps) … … … 0,0,0 1,0,0 Tru,0,0 Tru+1,0,0 Tsu,0,0 Tsu+1,0,0 +r +r +r m m m (1-pr) Mathematical Analysis
Mathematical Analysis General K, Pure Sender-Initiated Policy
Mathematical Analysis General K
Mathematical Analysis General K
Stochastic Derivative-Free Optimization • Internal Model • External Model • Trust Region
General Overview • Optimal Dynamic Threshold Scheduling Policy • Fluid limits • Diffusion limits • Analysis of Dynamic Threshold Scheduling • Consider generalized threshold scheduling policy • Matrix-analytic analysis and fix-point solution, asymptotically exact • Numerical experiments • Optimal settings of dynamic scheduling policy thresholds • Stochastic Derivative-Free Optimization