Download
1 / 1
10 likes | 103 Views
Estimation of upper limb inertial moments using the Impulse-Momentum Theorem method compared to geometric methods like Hanavan and Zatzyorsky. Results show lower time dependency with implications for stiffness and damping estimations. Simulation validated the technique using joint torques and dynamics.

E N D
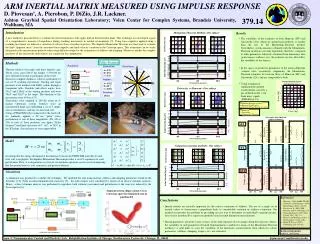
Zatsiorsky vs Hanavan– One subject Momentum Theorem Method– One subject HV HV ZA ZA HV ZA Hand Inertia [kg] Hand Inertia [kg] y y y y y y x x x x x x HV Elbow Elbow ZA HV Shoulder Shoulder Joint Inertia [kg m²] Joint Inertia [kg m²] ZA HV S-E S-E ZA d/4 3d/4 d/2 d/4 3d/4 d/2 Perturbation position Perturbation position ARM INERTIAL MATRIX MEASURED USING IMPULSE RESPONSE D. Piovesan†, A. Pierobon, P. DiZio, J.R. Lackner. Ashton Graybiel Spatial Orientation Laboratory; Volen Center for Complex Systems, Brandeis University, Waltham, MA 379.14 Introduction A new method is presented here to estimate the inertial moments of the upper limb in the horizontal plane. This technique was developed as part of a comprehensive measure of impedance during reaching movements in inertial environments [3]. Using force impulses applied along a reaching movement we induced a variation of velocity from a baseline trajectory. The Impulse-Momentum Theorem was then used to estimate the limb “apparent mass” from the measured force-impulse and hand velocity variation in the Cartesian space. This estimation can be easily integrated in the measurement protocol when using different setups for the estimations of stiffness and damping. Moreover, neither the complex geometry of the arm nor the limb density, are required in the computation. • Results • The variability of the estimates of both Hanavan (HV) and Zatzyorsky (ZA), which are geometrical methods, is smaller than the one of the Momentum-Theorem method. Nevertheless, inertia measures obtained with the Momentum-Theorem model are not time dependent, therefore, compared to other parameters indirectly estimated from kinematics data (joint torques, stiffness, etc), the estimates are less affected by the variability of the sources. • In the space of geometric parameters of the inertia ellipsoids (volume ratio, eccentricity, alignment), the Momentum-Theorem estimates lie between those of Hanavan (HV) and Zatzyorsky (ZA), and are comparable to both. Pulse Feature Methods Thirteen subjects (ten males and three females; age: 32±14 years; mass:78±15 kg; height: 1.75±0.08 m) gave informed consent to participate in the study. Seated in complete darkness, subjects performed 12 sets of 15 reaching movements. Starting and target positions were marked with LEDs visible through a transparent table. Shoulder and elbow angles were 35±2º and 120±6º at the starting position, and were 70±4º and 55±3º at the target. The duration of the movements were 494 ms ±7%. Trajectories were sampled at 200 Hz using an 8-marker Optotrack system. Subjects wore an instrumented hand-cast embedding a set of 3 single-axis accelerometers, and one six-axis load cell. Using a PHANToM robot connected to the load cell, we randomly applied a 20 ms “pulse” force perturbation at one of three magnitudes (3N, 4N or 5N) at each of three positions (see figure “Pulse Features”) and three directions (45º, 165º, or 285º) in the XY plane. Six trials per set were unperturbed. Positions: Intensities: Directions: Y 35±2º A=3[N] B=4[N] C=5[N] 70±4º end B 3d/4 A Angles: d 55±3º d Simulated hand inertia in Cartesian space d/2 120±6º A=165[º] B=45[º] C=285[º] • Using a numerical simulation the method could identify correctly a pre-defined model even from noisy signals (SNR(dB)=13.9). X start 2 Y d/4 X 1.5 end ±1% of d 1 Duration: C 0.5 start 20[ms] 0 X-axis [kg] -0.5 -1 -1.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 Y-axis [kg] d/4 Alignment[deg] Eccentricity Volume ratio Model Assuming that the energy dissipated at the interface between the PHANToM end-effector and wrist cuff is negligible, the Impulse-Momentum Theorem provides a set of 2 equations for each perturbation. Thus, at each position a system of six algebraic equations can be resolved imposing that the inertial tensor is real, symmetric and positive-definite. Comparison amongst methods– One subject d/2 Hand Inertia [kg] Alignment[deg] Eccentricity Volume ratio y y y x x x Elbow 3d/4 Simulation A simulation was produced to validate the technique. We modeled the arm using inertial, stiffness and damping parameters found in the literature [1,2]. From an ideal minimum jerk trajectory [5], the joint torques were calculated by means of an inverse dynamic analysis. Hence, a direct dynamic analysis was performed to reproduce both voluntary movement and perturbation to the trajectory induced by the force impulse [6]. Shoulder Joint Inertia [kg m²] Alignment[deg] Eccentricity Volume ratio S-E Hanavan d/4 3d/4 d/2 Segment inertia ellipses about CG in Cartesian space for simulated arm in position d/2 Zatziorsky Perturbation position MT HV ZA HV MT MT ZA ZA HV Momentum Theorem • References • 1. Hanavan, (1964) AMRL-TR-102. • 2. Zatsiorsky and Seluyanov, (1985) Biomechanics IX-B: 233-239. • 3. Piovesan et al. (2007) SFN Meeting, 818.14, San Diego, CA • Gomi and Kawato, (1997) Biol Cybern 76(3): 163–171 • Flash, T. and N.Hogan. (1985). J. Neuroscience 5: 1688-1703. • Risher D.W. et al (1997). J.Biom.Eng 119: 417-422 • Conclusions • Inertial models are crucially important for the correct estimation of stiffness. The use of a single set of inertial values to characterize a population leads to considerable variation in stiffness estimation. Our method circumvents this problem by providing an easy way to determine an individual’s segment inertias, free of error introduced by regression methods based on limb dimension measurements. • Inertial parameters about the center of mass of the limb segments do not change along the trajectory. Hence, the variability of such parameters obtained from kinematics variables by means of the Momentum-Theorem method is a valid index to asses the variability of the kinematics measurements from which less robust parameters (stiffness, damping, torques, etc.) are estimated. IMPULSE FORCE FOREARM UPPER ARM GROUND SHOULDER ELBOW NOISE HAND MEASURED KINEMATICS INVERSE DYNAMICS TORQUE Acknowledgements NIH RO1, AR48546-01. †now @ Neuromuscular Control and Plasticity Lab, Rehabilitation Institute of Chicago, Northwestern University, Chicago, IL, 60611 d-piovesan@northwestern.edu Simulated Inertia w/ noise STIFFNESS AND DAMPING Imposed hand Inertia Simulated Hand Inertia w/o noise