Download
1 / 153
1.54k likes | 1.74k Views
The foot is connected to the leg in the ankle joint. The ankle joint is a single-axle hinge-joint. Its motion axis is essentially a straight line connecting the peaks of the medial and lateral malleus. Its movements are the dorsal- and plantar flexion.

E N D
The foot is connected to the leg in the ankle joint. The ankle joint is a single-axle hinge-joint. Its motion axis is essentially a straight line connecting the peaks of the medial and lateral malleus. Its movements are the dorsal- and plantar flexion. The motion axis of the ankle joint forms an angle of 80 with the horizontal plane and 15 to 20 with the frontal plane.
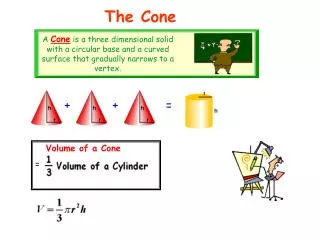
The joint surface of the talus represents a laterally based cone segment.
Due to its form and position, the single axle joint brings the foot into ab-adduction during its movement and at the same time ensures a small rotation of the leg above the fixed foot.
What is the foot? The foot is that what is inside the shoe.
The human foot is a race-specific functional unit consisting of 26 bones.
Why is the foot so special and important? • In the human evolution it is the youngest race-specific structure. • The kinetic chain of the lower extremity becomes closed kinetic chain due to the support of foot on the ground. 3. The foot is the key of absorbing the rotation.
The foot is the youngest part of the human organism that developed about two million years ago. Atavistic marks can still often observed.
According to the convention, the foot is a dual arched structure supported on three points. Statically the arched structure is the most suitable one for load bearing purposes where the load bearing capacity changes in proportion to the height of it.
The arched joining of the metatarsal bases to the tarsus forms the transversal arch that is higher in proximally, its peak is the basis of metatarsus II while the heads are in a single plane. Due to their flexion, the metatarsals also forming of the longitudinal arch as well.
Whatsupportsthearch? Is it a tension wire or support of its two ends?
In general the contraction of the muscles are drawing together their origin and insertion,and due to their attachment to the bones forming joints cause movement around the motional axis.
In case of the short flexors with the origin at the calcaneus and insertion at the medial phalanx the contraction results in the plantar flexion of the lesser toes.
The axial load tends to break the end- points of the arch open. The short sole muscles, however, do not connect the points A and B together, instead, they are attached to the medial phalanx. Thus, the real mechanical tension is resulted not by the active contraction of the short flexors, rather the passive extension that is the dorsiflexion of the toes
The importance of the short sole muscles due to the flexion of toes is the cooperation in load bearing and stability during the toe-off; however, they play no part in maintaining the arch of the foot.
The foot can be statically modeled by means of a simple lattice structure built of triangles. As the triangle preserves its form in spite of any load affecting at its nodes, the structure fails to collapse under any load.
The existence of the arch is only a necessary but not sufficient condition for the normal function of the foot.
The tasks imposed on to the foot in static and dynamic conditions are as follows: 1. It is a basis bearing the body weight that shall lye on the ground to ensure the proper stability in case of either double- or single-foot support. 2. While walking at the heel-strike the foot has to be springy to damp the abrupt load caused by body weight.
3. The axial rotation that occurs around the longitudinal axis of the lower extremity during gait has to be absorbed. 4. It shall be appropriately flexible to reduce the amplitude of motion of the gravitational centre and the kinetic energy necessary for its displacement to as low as possible. 5. It shall be appropriately rigid in order to be capable of functioning as a lever in forwarding the body weight.
Due to its special structure, the foot is capable of fulfilling all these tasks In itself, a rigid arched structure would result in an appropriately stable static formation; on the other hand, the foot is a dynamic functional unit the normal function of which is essential during gait.
Human GAIT The human gait is a specific and individual way of voluntary displacement motion. In respect of consciousness, it is a secondary automatism, that is, a learnt process except the simultaneous movement of the arms. The gait typical to adults is developing in childhood between 7 and 9 years.
The gait is as typical to the individuals as the mimetic and gesticulation. In addition to individual characteristics, momentarily external and internal circumstances, e.g. disposition, tiredness, cloth, weather- and road conditions are also reflected in the gait. There are, however, well definable permanent parameters that promote to compare the various types of the gait, and the pathologic gait from normal one to be distinguished.
Why is the gait of outstanding importance? • The regeneration stimulus is the own function of each tissue: load of bones, contraction of muscles, pressure (variation) of cartilage. /EgyedBéla/ • Self-dependentdisplacementFREEDOM
The gait consists in the translocation of the gravity centre of body from one point to another one through continuous losing and recovering the equilibrium by means of cyclic plantigrad alternating bipedal motion
The gait consists in the translocation of the gravity centre of body from one point to another one through continuous losing and recovering the equilibrium by beans of cyclic plantigrad alternating bipedal motion. Mechanically it means the displacement of the mass of body within a step length that involves work to perform.
It is known from the mechanics that, if a mass is in a steady motion on a straight line without the influence of any external force (including reactive force), the energetic situation is the same as if the mass were in standstill. It could occur if we were rolling on two wheels
The bipedal gait also involves the necessary rhythmical motion of the gravitational centre both in vertical and lateral directions. When the body weight is transferred from the one foot to the another one, that is, the lower extremities are separated, the distance between the centre of gravity at the height of the sacrum and the ground is smaller than that if the trunk passes over the relatively extended lower extremity. This results in rhythmical vertical oscillation during gait.
Thus, the centre of gravity moves along a sinusoidal curve in the vertical plane and reaches its maximum height immediately after passing over the load bearing lower extremity; then, it moves downwards. It reaches its deepest point at the time the heel contact of the opposite lower extremity; then, it moves upwards again. The amplitude of the curve lies between 4 and 5 cm as an average.
During gait, the body fails to remain in the plane of motion; instead, it oscillates laterally, while making effort to preserve the centre of gravity approximately above the load bearing lower extremity. The lateral translocation follows an oblique sinusoidal path of 4 to 5 cm amplitude.
The gait consists in the translocation of the gravity centre of body from one point to another one through continuous losing and recovering the equilibrium by means of cyclic plantigrad alternating bipedal motion. Positions of equilibrium: • stable • unstable • ndifferent