Download
1 / 1
10 likes | 198 Views
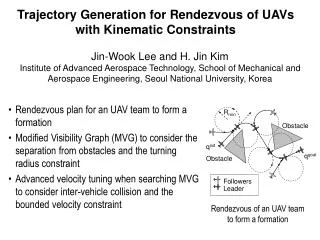
Trajectory Generation for Rendezvous of UAVs with Kinematic Constraints. Jin-Wook Lee and H. Jin Kim Institute of Advanced Aerospace Technology, School of Mechanical and Aerospace Engineering, Seoul National University, Korea. Rendezvous plan for an UAV team to form a formation

E N D
Trajectory Generation for Rendezvous of UAVs with Kinematic Constraints Jin-Wook Lee and H. Jin KimInstitute of Advanced Aerospace Technology, School of Mechanical and Aerospace Engineering, Seoul National University, Korea • Rendezvous plan for an UAV team to form a formation • Modified Visibility Graph (MVG) to consider the separation from obstacles and the turning radius constraint • Advanced velocity tuning when searching MVG to consider inter-vehicle collision and the bounded velocity constraint Rmin Obstacle qinit qgoal Obstacle Followers Leader Rendezvous of an UAV team to form a formation