Download

1 / 22
250 likes | 478 Views
Zjawiska ruchu. Ruch – jedno w najczęściej obserwowanych zjawisk fizycznych. Często ruch zachodzi z tak dużą lub tak małą prędkością i w tak krótkim lub tak długim czasie, że nie można obserwować bezpośrednio jego przebiegu. Wówczas zarejestrujemy trajektorię poruszającego się obiektu.

E N D
Zjawiska ruchu Ruch– jedno w najczęściej obserwowanych zjawisk fizycznych Często ruch zachodzi z tak dużą lub tak małą prędkością i w tak krótkim lub tak długim czasie, że nie można obserwować bezpośrednio jego przebiegu. Wówczas zarejestrujemy trajektorię poruszającego się obiektu Ten ruch cząstek emitowanych w zderzeniach jąder atomowych trwał ułamki milionowych części sekundy. (CERN, Rap.Ann. 1986) Teleskop ''Gemini'' na Hawajach. Widoczne ślady ruchu samochodów i ... gwiazd. (Cern Courier, 39/7, 1999)
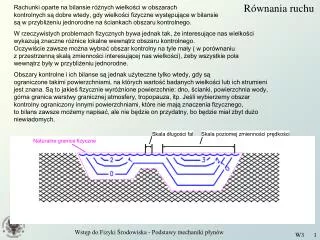
Układ odniesienia związany z przejazdem kolejowym i umiejscowiony na nim układ współrzędnych prostokątnych Z Y X Opis ruchu - podstawowe pojęcia (1) • Układ odniesienia – nieruchome w czasie obserwacji ciało lub zbiór ciał, względem którego • opisujemy ruch innych ciał • Układ współrzędnych – związany z danym układem odniesienia zespól wzajemnie prostopadłych • osi umożliwiający jednoznaczne określenie położenia punktu w przestrzeni • Punkt materialny - ciało, którego rozmiary w badanym ruchu można uznać za pomijalnie małe • Układ punktów materialnych - zbiór skończonej liczby punktów materialnych o zadanej • konfiguracji przestrzennej • Ciało sztywne – ciało,które nie ulega odkształceniu w czasie rozpatrywanego ruchu • Stan spoczynkuwzględem danego układu odniesienia – kiedy ciało nie zmienia swego położenia • względem tego układu odniesienia.
Opis ruchu - podstawowe pojęcia (2) • Ruch postępowy - wszystkie punkty danego ciała przemieszczają się tak samo co do wartości i • kierunku względem zadanego układu odniesienia • Ruch prostoliniowy - przemieszczenie odbywa się wzdłuż linii prostej • Ruch obrotowy - wszystkie punkty danego ciała poruszają się po okręgach, których środki znajdują • się na jednej prostej - osi obrotu • Ruch płaski – ruch zachodzący w jednej płaszczyźnie. • Kinematyka – dział fizyki zajmujący się opisem ruchu, bez wnikania w jego przyczyny • Dynamika - dział fizyki zajmujący się opisem związków pomiędzy przyczynami ruchu, a jego • własnościami Pociąg TGV na dworcu w Nantes; prędkość przejazdowa: 300 km/godz.
- osie układu współrzędnych - wektor położenia punktu w przestrzeni (promień wodzący) • wersory osi układu • współrzędnych • współrzędne prostokątne • punktu w przestrzeni - współrzędne początku układu Promień wodzący punktu P Układy współrzędnych (1) Układ współrzędnych prostokątnych P – punkt w przestrzeni trójwymiarowej długość promienia wodzącego
Wektor położenia w układzie współrzędnych sferycznych: Współrzędne w układzie prostokątnym wyrażone przez współrzędne sferyczne: Współrzędne sferyczne wyrażone przez współrzędne prostokątne: Układy współrzędnych (2) Układ współrzędnych sferycznych
Wektor położenia w układzie współrzędnych cylindrycznych: Układy współrzędnych (3) Układ współrzędnych cylindrycznych Współrzędne w układzie prostokątnym wyrażone przez współrzędne cylindryczne: Współrzędne w układzie cylindrycznym wyrażone przez współrzędne prostokątne:
Wektor położenia w układzie współrzędnych biegunowych: Współrzędne w układzie biegunowym wyrażone przez współrzędne prostokątne: Układy współrzędnych (4) Układ współrzędnych biegunowych Współrzędne w układzie prostokątnym wyrażone przez współrzędne biegunowe:
Wektor położenia w funkcji czasu. Zmiana wektora położenia w przedziale czasu . Zmiana położenia w jednostce czasu: - prędkość chwilowa Prędkość Fot. Ruch samochodu w czasie fotografowania Wielkość „rozmycia” proporcjonalna jest do prędkości samochodu i czasu naświetlana. Kiedy przyrost czasu dąży do zera, to
Prędkość (2) Kierunek, zwrot i wartość wektora prędkości Kierunek wektora prędkości chwilowej pokrywa się ze styczną do toru w danym punkcie, a jego zwrot wyznaczony jest przez znak przyrostu wektora położenia. Wartość wektora prędkości: To wskazuje prędkościomierz w samochodzie.
Prędkość (3) Wektor prędkości w układzie współrzędnych biegunowych Czym jest ? prędkość radialna prędkość transwersalna
Prędkość (4) Wektor prędkości w układzie współrzędnych biegunowych prędkość radialna: prędkość transwersalna (azymutalna): Wartość bezwzględna wektora prędkości:
s Przemieszczenie i droga Zmiana położenia w czasie Przemieszczenie w skończonym odcinku czasu: Przebyta droga: Jeśli prędkość nie zmienia się, to:
Przyspieszenie(ang: acceleration), to zmiana prędkości w funkcji czasu. Definicja wektora przyspieszenia: Przyspieszenie (1) Przyspieszenie jest pochodną wektora prędkości względem czasu, czyli drugą pochodną wektora położenia względem czasu. Składowe wektora przyspieszenia w układzie współrzędnych prostokątnych:
- wersor styczny do toru w danym punkcie. Przyspieszenie (2) ds - element drogi przebyty w czasie dt Zauważmy, że: więc: - wersor prostopadły do toru w danym punkcie.
Kiedy naciskasz pedał gazu lub hamulca – zmieniasz as. Kiedy kręcisz kierownicą - zmieniasz an. Przyspieszenie (3) an - przyspieszenie normalne (dośrodkowe) as - przyspieszenie styczne Zapamiętaj dobrze tę zależność. Jeszcze do niej powrócimy. Przyspieszenie, to nie tylko zmiana prędkości, to także zmiana kierunku
Przykład – ruch ze stałym przyspieszeniem (1) Warunki początkowe Składowe: [x,y,z] przyspieszenia, prędkości i położenia ciała dla czasu t=0 . Zakładamy, że az0=const. Zadanie:Zbadać ruch odpowiadając na pytania: 1. Jak zmienią się te wartości po czasie t ? 2. Jaki będzie kształt toru?
Przykład – ruch ze stałym przyspieszeniem (2) wartości stałe w kierunku osi X: nie ma ruchu Przyspieszenie: Prędkość: w kierunku osi Y: ruch ze stałą prędkością w kierunku osi Z: ruch ze stałym przyspieszeniem
Przykład – ruch ze stałym przyspieszeniem (3) w kierunku osi X: położenie bez zmian Położenie: w kierunku osi Y: liniowa zależność położenia od czasu w kierunku osi Z: kwadratowa zależność położenia od czasu
Eliminujemy czas: Przykład – ruch ze stałym przyspieszeniem (4) Równanie toru,z=f(y): Równanie toru: równanie paraboli
Przykład – ruch ze stałym przyspieszeniem (5) Ilustracja graficzna rozwiązania
Przykład – ruch ze stałym przyspieszeniem (6) Strumień wody w łazience kreśli parabolę Kliknij w polu fotografii. Symbol Genewy – fontanna o wysokości 130 m wyrzuca 500 litrów wody w każdej sekundzie. Odpowiedz: ile wody utrzymuje ta fontanna w powietrzu?