Kinect を利用したロボットの操作
Kinect を利用したロボットの操作. Takashio lab sociable robots 高崎 智裕 ( takasaki ). きっかけ. ロボットってかっこいいよね 。. http://kondo-robot.com/. http://www.bostondynamics.com/robot_bigdog.html. 空飛ぶ ロボットかっこいい. http://www.lexus-int.com/jp/amazinginmotion/swarm/. 作ってみたいけど. 知識がない。 技術 もない。 経験 もない。. ここに、ロボットがあります.

Kinect を利用したロボットの操作
E N D
Presentation Transcript
Kinectを利用したロボットの操作 Takashiolabsociable robots 高崎智裕(takasaki)
きっかけ • ロボットってかっこいいよね。 http://kondo-robot.com/ http://www.bostondynamics.com/robot_bigdog.html
空飛ぶロボットかっこいい http://www.lexus-int.com/jp/amazinginmotion/swarm/
作ってみたいけど • 知識がない。 • 技術もない。 • 経験もない。
ここに、ロボットがあります • とりあえず動かしてみようか。 • 自分に今できること、必要なことが知りたい。 • 勉強、勉強。
どんなロボット? • 近藤科学 KHR-3HV • 自由度 17 • 人型二足歩行ロボット
この2か月で • とりあえずは、動いた。 • 手を上げる、しゃがむ等の単純な動き。 • 命令したら、その通りの動きをする。 • 「歩け」と命令したら歩く、そんなの当たり前。
ただ動かすのは簡単すぎる • Kinectで動かしてみる。
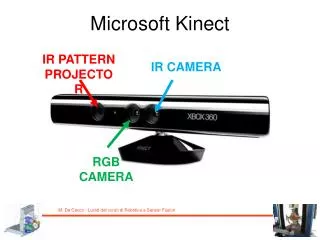
Kinectで何ができるのか • 人体の20個の関節を追跡することができる。 • 関節と関節を結んで、棒人間をつくる。 • 棒人間の動きにロボットを合わせる。
目標 • ロボットを動かせるようになる。 • Kinectから操作できるようにする。 • 知識と技術と経験を重ねる。
今後どうするか • 今年中 • Kinectからモーションデータを得る。 • 得られたモーションデータを、分析する。 • 1月 • 各モータに情報を送れるようにする。 • 動きの調整をする。