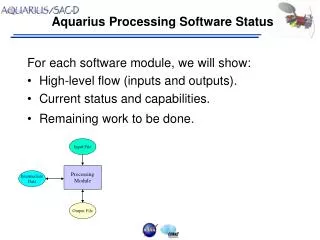
Aquarius Level 0-to-1A Processing
Aquarius Level 0-to-1A Processing. Rule #1: save everything from the Level 0 data. Rule #2: never forget Rule #1! The objective is to ensure that the Level 0-to-1A conversion is fully reversible. Level-0 File Overview.

Aquarius Level 0-to-1A Processing
E N D
Presentation Transcript
Aquarius Level 0-to-1A Processing • Rule #1: save everything from the Level 0 data. • Rule #2: never forget Rule #1! • The objective is to ensure that the Level 0-to-1A conversion is fully reversible.
Level-0 File Overview • A single copy of the contents Aquarius memory at the time of the downlink, in time order, as generated by the Aquarius preprocessor. • Data consist of binary science blocks spanning a period of ~14 hours (110 Mbytes).
Level-1A Product Overview • Level-1A data consists of unpacked, unconverted science data and instrument housekeeping telemetry, with navigation and required spacecraft telemetry. • Each file contains 1 orbit (starting at South Pole crossing) plus 10 minutes at each end. • Level-1A products are formatted using HDF5: • Machine-independent, hierarchical, self describing format • Attributes contain descriptive information about the entire file or individual objects within the file • Groups provide logical association and hierarchy • Data objects are multidimensional arrays of standards types
Level-1A Product Elements • Product metadata, i.e., descriptive information about the entire file (e.g., sensor, time, quality) • Data characteristics (number of blocks, etc.) • Science block metadata (time and quality) • Raw sensor data: • Block header elements • Housekeeping telemetry by subsystem • Radiometer and scatterometer science data, • Navigation data (original sampling rate) • Orbit vectors from predicted or definitive ephemeris • Attitude data from SAC-D telemetry • Unpacked and converted Aquarius housekeeping telemetry • SAC-D housekeeping telemetry (selected fields converted)
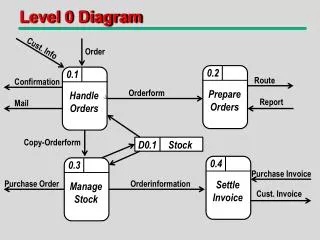
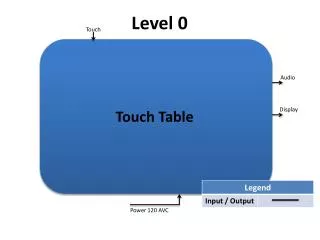
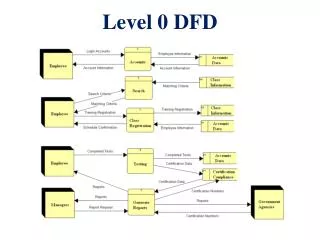
Synch word GPS time tag Time tag offset Antenna telemetry ICDS processing status ICDS engineering telemetry Mechanical telemetry APDU telemetry ATC telemetry Scatterometer HKT Scatterometer science data Radiometer RT HKT Radiometer NRT HKT Radiometer science data Level 0-to-1A Mapping Synch and Time Tag Aquarius Raw Telemetry Scatterometer science data Header Power Loopback DC Radiometer science data Header Short Accumulations Long Accumulations Checksum
Level-1A Ancillary Data • Orbit ephemeris data provided by CONAE: • Predictive ephemeris for near-real-time processing • Definitive ephemeris for refined processing • GPS data from SAC-D as backup • Attitude data from SAC-D housekeeping telemetry • Additional SAC-D housekeeping telemetry provided by CONAE from downlink data
Calibration and Orbit Adjust Data • Cold sky calibration and orbit adjust periods will be identified during Level-1A processing, either from the command schedule or the spacecraft housekeeping telemetry. • Data from these periods (plus additional data as needed for stabilization, TBD) will be written to separate files and excluded from downstream processing. • Calibration files will be provided for offline analysis.
Level-1A Format Examples 3.1 Mission and Documentation Product Name (character): the name of the product file (without path). Title (character): "Aquarius Level‑1A Data". Data Center (character): "NASA/GSFC Aquarius Data Processing Center". Mission (character): "SAC-D Aquarius". Mission Characteristics (character): "Nominal orbit: inclination = 98.0 (Sun-synchronous); node = 6 PM (ascending); eccentricity = <0.002; altitude = 650 km; ground speed = 6.825 km/sec". Sensor (character): "Aquarius". Data Type (character): "SCI”, “CAL” or “DMP”. Software ID (character): identifies version of the operational software used to create this product. Processing Time (character): local time of generation of this product; concatenated digits for year, day-of-year, hours, minutes, seconds, and fraction of seconds in the format of YYYYDDDHHMMSSFFF. Input Files (character): the name of the Level‑0 file(s) (without path) from which the current product was created. This information is stored in the product as part of its processing history. Processing Control (character): all input and processing control parameters used by the calling program to generate the product. Vertical bars or carriage return characters serve as parameter information delimiters. This information is stored in the product as part of its processing history.
Level-1A Format Examples (cont.) 4.2.3 Raw Radiometer Science Data radiom_header (2‑byte integer, array size Number of Blocks): long_name = ”Radiometer block header"; this header specifies the packet type (standard or memory dump) and the housekeeping telemetry packet number (0 through 3). radiom_savg (2‑byte integer, array size Number of Blocks x Radiometer Subcycles x Radiometer Short Accumulations x Radiometer Channels): long_name = “Radiometer Short Accumulations”; radiometer data accumulated and averaged within a subcycle. radiom_lavg (2‑byte integer, array size Number of Blocks x Radiometer Long Accumulations x Radiometer Channels): long_name = “Radiometer Long Accumulations”; radiometer data accumulated and averaged over multiple subcycles within a block. 4.2.4 Raw Scatterometer Science Data scatter_headers (byte, array size Number of Blocks x Scatterometer Subcycles): long_name = “Scatterometer subcycle headers”; headers for each scatterometer subcycle within a block. scatter_pwr (2‑byte integer, array size Number of Blocks x Scatterometer Subcycles x Scatterometer Channels): long_name = “Scatterometer Power”; raw scatterometer power data for each subcycle within a block. scatter_loop (2‑byte integer, array size Number of Blocks x Scatterometer Channels): long_name = “Scatterometer Loopback Measurements”; scatterometer loopback data average over the subcycles within a block. scatter_dc (2‑byte integer, array size Number of Blocks x 2): long_name = “Scatterometer DC data”; raw scatterometer DC data averaged over the subcycles within a block.
Aquarius Level-1A Merge • Multiple versions of Level-1A products will be generated for each orbit from overlapping periods in successive Level-0 files. • Level-1A merge processing will consolidate these into a single product by selecting the best quality data for each science block using TBD metrics.
Aquarius Level-1B Products • Separate files for radiometer and scatterometer. • Formatted using HDF5 • Product-level metadata is essentially the same as for Level 1A. • Calibrated science data, processing information and quality indicators as defined for each data type, per beam and polarization. • Navigation and geolocation data at block or subcycle times.
Radiometer Level-1B Science Data • Calibrated brightness temperatures (per subcycle) • Noise temperatures (per block) • Voltage offsets (per block) • Gains (per block) • RFI flags (per subcycle) • Brightness temperatures RMS (per subcycle)
Scatterometer Level-1B Science Data • Sigma0 (backscatter) • KPC (normalized standard deviation) • Signal-to-noise ratio • Noise value All fields generated per subcycle
Level-1B Navigation Data • Orbit position and velocity (per block) • Attitude roll, pitch and yaw angles (per block) • Beam center latitude/longitude (per beam and subcycle) • Beam edge latitude/longitude (ellipse major and minor axes) (per beam and block) • Incidence and azimuth angles (per beam and block) • Polarization roll (per beam and block) • Doppler shift (per beam and block)
Pointing Knowledge Assessment • Pointing knowledge requirement is 0.1 degree 3 sigma, driven primarily by the radiometer sensitivity to the incidence angle. • This is equivalent to about 2 km of location accuracy at the surface. • Verifying this level of accuracy could be challenging with the Aquarius beam size. • Overlap with land surfaces should be useful, but approach needs to be developed. • This will most likely be performed as a separate processing step after Level-1B processing.
Pointing Knowledge Assessment (cont.) • What is the expected sensitivity of the radiometer signal to land vs. ocean surface? • How does this vary with surface type? • Is surface elevation a factor? • How is polarization affected? • Will the sensitivity and coverage be sufficient to characterize systematic as well as static errors? • How can the method be designed to process a reasonable minimum subset of the radiometer data (60,000 blocks, 720,000 subcycles) per day? • Does the scatterometer provide an independent assessment?