Spatial Filtering
Spatial Filtering. Background. Filter term in “ Digital image processing ” is referred to the subimage There are others term to call subimage such as mask, kernel, template, or window The value in a filter subimage are referred as coefficients, rather than pixels.

Spatial Filtering
E N D
Presentation Transcript
Background • Filter term in “Digital image processing” is referred to the subimage • There are others term to call subimage such as mask, kernel, template, or window • The value in a filter subimage are referred as coefficients, rather than pixels.
Basics of Spatial Filtering • The concept of filtering has its roots in the use of the Fourier transform for signal processing in the so-called frequency domain. • Spatial filtering term is the filtering operations that are performed directly on the pixels of an image
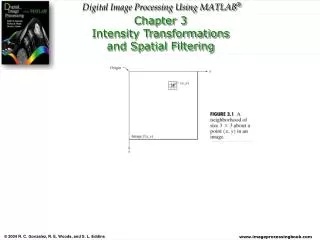
Mechanics of spatial filtering • The process consists simply of moving the filter mask from point to point in an image. • At each point (x,y) the response of the filter at that point is calculated using a predefined relationship
f(x-1,y-1) f(x-1,y) f(x-1,y+1) f(x,y-1) f(x,y) f(x,y+1) f(x+1,y-1) f(x+1,y) f(x+1,y+1) w(-1,-1) w(-1,-1) w(-1,0) w(-1,0) w(-1,1) w(-1,1) w(0,-1) w(0,-1) w(0,0) w(0,0) w(0,1) w(0,1) w(1,-1) w(1,-1) w(1,0) w(1,0) w(1,1) w(1,1) Linear spatial filtering Pixels of image The result is the sum of products of the mask coefficients with the corresponding pixels directly under the mask Mask coefficients
Note: Linear filtering • The coefficient w(0,0) coincides with image value f(x,y), indicating that the mask is centered at (x,y) when the computation of sum of products takes place. • For a mask of size mxn, we assume that m-2a+1 and n=2b+1, where a and b are nonnegative integer. Then m and n are odd.
Linear filtering • In general, linear filtering of an image f of size MxN with a filter mask of size mxn is given by the expression:
Discussion • The process of linear filtering similar to a frequency domain concept called “convolution” Simplify expression w1 w2 w3 w4 w5 w6 w7 w8 w9 Where the w’s are mask coefficients, the z’s are the value of the image gray levels corresponding to those coefficients
Nonlinear spatial filtering • Nonlinear spatial filters also operate on neighborhoods, and the mechanics of sliding a mask past an image are the same as was just outlined. • The filtering operation is based conditionally on the values of the pixels in the neighborhood under consideration
Smoothing Spatial Filters • Smoothing filters are used for blurring and for noise reduction. • Blurring is used in preprocessing steps, such as removal of small details from an image prior to object extraction, and bridging of small gaps in lines or curves • Noise reduction can be accomplished by blurring
Type of smoothing filtering • There are 2 way of smoothing spatial filters • Smoothing Linear Filters • Order-Statistics Filters
Smoothing Linear Filters • Linear spatial filter is simply the average of the pixels contained in the neighborhood of the filter mask. • Sometimes called “averaging filters”. • The idea is replacing the value of every pixel in an image by the average of the gray levels in the neighborhood defined by the filter mask.
1 1 1 1 2 1 1 1 1 2 4 2 1 1 1 1 2 1 Two 3x3 Smoothing Linear Filters Standard average Weighted average
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 5x5 Smoothing Linear Filters
Smoothing Linear Filters • The general implementation for filtering an MxN image with a weighted averaging filter of size mxn is given by the expression
Result of Smoothing Linear Filters Original Image [3x3] [5x5] [7x7]
Order-Statistics Filters • Order-statistics filters are nonlinear spatial filters whose response is based on ordering (ranking) the pixels contained in the image area encompassed by the filter, and then replacing the value of the center pixel with the value determined by the ranking result. • Best-known “median filter”
10 15 20 20 100 20 20 20 25 Process of Median filter • Corp region of neighborhood • Sort the values of the pixel in our region • In the MxN mask the median is MxN div 2 +1 10, 15, 20, 20, 20, 20, 20, 25, 100 5th
Result of median filter Noise from Glass effect Remove noise by median filter
Homework • ลองนำภาพสี มาหา smoothing filter โดยใช้ mask standard ขนาด 3x3, 5x5, 7x7, 9x9 ส่งผลลัพธ์พร้อม source code • นำภาพสีมาหา median filter โดยใช้ mask 3x3, 5x5,7x7,9x9 ส่งผลลัพธ์พร้อม source code • ภาพที่นำมาทดสอบควรมีขนาดตั้งแต่ 100x100 ขึ้นไป • วัดความเร็วในการประมวลผลของแต่ละ filter ด้วยคะ
Sharpening Spatial Filters • The principal objective of sharpening is to highlight fine detail in an image or to enhance detail that has been blurred, either in error or as an natural effect of a particular method of image acquisition.
Introduction • The image blurring is accomplished in the spatial domain by pixel averaging in a neighborhood. • Since averaging is analogous to integration. • Sharpening could be accomplished by spatial differentiation.
Foundation • We are interested in the behavior of these derivatives in areas of constant gray level(flat segments), at the onset and end of discontinuities(step and ramp discontinuities), and along gray-level ramps. • These types of discontinuities can be noise points, lines, and edges.
Definition for a first derivative • Must be zero in flat segments • Must be nonzero at the onset of a gray-level step or ramp; and • Must be nonzero along ramps.
Definition for a second derivative • Must be zero in flat areas; • Must be nonzero at the onset and end of a gray-level step or ramp; • Must be zero along ramps of constant slope
Definition of the 1st-order derivative • A basic definition of the first-order derivative of a one-dimensional function f(x) is
Definition of the 2nd-order derivative • We define a second-order derivative as the difference
0 0 0 1 2 3 2 0 0 2 2 6 3 3 2 2 3 3 0 0 0 0 0 0 7 7 6 5 5 3 7 6 5 4 3 2 1 0 Gray-level profile
Derivative of image profile 0 0 0 1 2 3 2 0 0 2 2 6 3 3 2 2 3 3 0 0 0 0 0 0 7 7 6 5 5 3 first 0 0111-1-2 0 2 0 4-3 0-1 0 1 0-3 0 0 0 0 0-7 0-1-1 0-2 second 0-1 0 0-2-122-24-73-111-1-33 0 0 0 0-77-1 0 1-2
Analyze • The 1st-order derivative is nonzero along the entire ramp, while the 2nd-order derivative is nonzero only at the onset and end of the ramp. • The response at and around the point is much stronger for the 2nd- than for the 1st-order derivative 1st make thick edge and 2nd make thin edge
The Laplacian (2nd order derivative) • Shown by Rosenfeld and Kak[1982] that the simplest isotropic derivative operator is the Laplacian is defined as
Discrete form of derivative f(x-1,y) f(x,y) f(x+1,y) f(x,y-1) f(x,y) f(x,y+1)
2-Dimentional Laplacian • The digital implementation of the 2-Dimensional Laplacian is obtained by summing 2 components 1 1 -4 1 1
0 1 1 0 1 1 0 1 1 1 1 0 -4 -8 -4 0 1 1 1 1 0 1 0 1 1 0 1 Laplacian
0 -1 -1 0 -1 -1 0 -1 -1 -1 -1 0 4 8 4 0 -1 -1 -1 -1 0 -1 0 -1 -1 0 -1 Laplacian
Implementation If the center coefficient is negative If the center coefficient is positive Where f(x,y) is the original image is Laplacian filtered image g(x,y) is the sharpen image
Implementation Filtered = Conv(image,mask)
Implementation filtered = filtered - Min(filtered) filtered = filtered * (255.0/Max(filtered))
Implementation sharpened = image + filtered sharpened = sharpened - Min(sharpened ) sharpened = sharpened * (255.0/Max(sharpened ))
Algorithm • Using Laplacian filter to original image • And then add the image result from step 1 and the original image
0 -1 -1 -1 -1 0 -1 -1 9 5 -1 -1 0 -1 -1 -1 -1 0 Simplification • We will apply two step to be one mask
Unsharp masking • A process to sharpen images consists of subtracting a blurred version of an image from the image itself. This process, called unsharp masking, is expressed as Where denotes the sharpened image obtained by unsharp masking, and is a blurred version of
High-boost filtering • A high-boost filtered image, fhb is defined at any point (x,y) as This equation is applicable general and does not state explicity how the sharp image is obtained
-1 0 -1 -1 0 -1 -1 -1 A+4 A+8 -1 -1 -1 0 -1 -1 -1 0 High-boost filtering and Laplacian • If we choose to use the Laplacian, then we know fs(x,y) If the center coefficient is negative If the center coefficient is positive
The Gradient (1st order derivative) • First Derivatives in image processing are implemented using the magnitude of the gradient. • The gradient of function f(x,y) is
Gradient • The magnitude of this vector is given by -1 1 This mask is simple, and no isotropic. Its result only horizontal and vertical. Gx 1 Gy -1
Robert’s Method • The simplest approximations to a first-order derivative that satisfy the conditions stated in that section are z1 z2 z3 Gx = (z9-z5) and Gy = (z8-z6) z4 z5 z6 z7 z8 z9
Robert’s Method • These mask are referred to as the Roberts cross-gradient operators. -1 0 0 -1 0 1 1 0
Sobel’s Method • Mask of even size are awkward to apply. • The smallest filter mask should be 3x3. • The difference between the third and first rows of the 3x3 mage region approximate derivative in x-direction, and the difference between the third and first column approximate derivative in y-direction.