
RED SAUC’ISSE ---------------------------------------------------------------- SAUC’ Interval Super Submarine of ENSIETA
Thrusters : 2 horizontal thrusters handle the speed and the direction of the robot. 1 vertical thruster controls the depth. The submarine keeps its stability thanks to a heavy keel which is also used to fix the sonar and the vertical thruster. Aluminium tube :

RED SAUC’ISSE ---------------------------------------------------------------- SAUC’ Interval Super Submarine of ENSIETA
E N D
Presentation Transcript
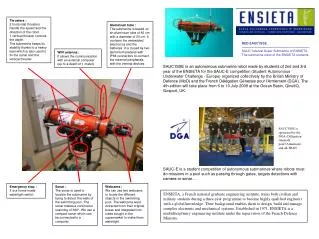
Thrusters : 2 horizontal thrusters handle the speed and the direction of the robot. 1 vertical thruster controls the depth. The submarine keeps its stability thanks to a heavy keel which is also used to fix the sonar and the vertical thruster. Aluminium tube : The submarine is based on an aluminium tube of 80 cm with a diameter of 20 cm. It contains the embedded electronics and the batteries. It is closed by two aluminium plaques with IP68 connectors to connect the external peripherals with the internal devices. RED SAUC’ISSE ---------------------------------------------------------------- SAUC’ Interval Super Submarine of ENSIETA The submarine robot of the ENSIETA students WIFI antenna : It allows the communication with an external computer (up to a depth of 1 meter). SAUC’ISSE is an autonomous submarine robot made by students of 2nd and 3rd year of the ENSIETA for the SAUC-E competition (Student Autonomous Underwater Challenge - Europe) organized collectively by the British Ministry of Defence (MoD) and the French Délégation Génerale pour l’Armement (DGA). The 4th edition will take place from 6 to 10 July 2009 at the Ocean Basin, QinetiQ, Gosport, UK. SAUC’ISSE is sponsored by the DGA (Délégation Générale pourl’Armement) and ALTRAN SAUC-E is a student competition of autonomous submarines where robots must do missions in a pool such as passing through gates, targets detections with camera or sonar… Emergency stop : It is a home-made watertight switch. Sonar : The sonar is used to localize the submarine by trying to detect the walls of the swimming pool. The sonar makes a continuous scanning of 360°. We use a compact sonar which can be connected to a computer. Webcams : We can use two webcams to locate the different objects in the swimming pool. The webcams were extracted from their original boxes and integrated into tubes bought in the supermarket to make them watertight. ENSIETA, a French national graduate engineering institute, trains both civilian and military students during a three-year programme to become highly qualified engineers with a global knowledge. Their background enables them to design, build and manage complex electronic and mechanical systems. Established in 1971, ENSIETA is a multidisciplinary engineering institute under the supervision of the French Defence Ministry.
SAUC’ISSE and its embedded electronic Wireless access point : In combination with the external antenna of 1m, it enables the robot to communicate with us (via a laptop) when it is near the water surface. Embedded computer : A PC104 computer has been integrated to our robot for its reasonable dimensions (10 cm x 10 cm) and its similarities with desktop computers (processor, USB, Ethernet ports…). It contains an Intel Celeron® 1Ghz processor, 512 Mo of RAM and a 2.5 hard drive with Windows or a compact flash memory card with Linux. Labjack UE9 : This professional system of data acquisition is connected to the computer via Ethernet or USB connection. This module has many inputs-outputs and can generate up to 6 PWM signals (to control the thrusters). It has also a temperature sensor which enables us to have information on the internal temperature of the submarine (preventing the tube from overheating). Electronic architecture Power supply : The power supply is divided into three parts: • The engines are powered by a 12 V battery • The sonar needs a specific battery of 24 V. • The PC 104 and the wireless access point (via the 5 V provided by the power supply PC104 module) are powered by an additional 12 V battery. This separation was made because of the engines requirements (loss of tension due to the launch of the propellers). Each part is protected by a fusible. Servo controllers : To control the thrusters with PWM electronic signals, we use Robbe Rokraft servo controllers. IMU (Inertial Measurement Unit) and pressure sensor : Inertial sensor with an integrated compass (orange box at the bottom) and pressure sensor (small tube).