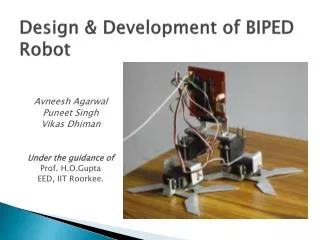
Biped Robots
Biped Robots Definitions Static Walking The centre of gravity of the robot is always within the area bounded by the feet that are touching the ground Dynamic Walking

Biped Robots
E N D
Presentation Transcript
Definitions • Static Walking • The centre of gravity of the robot is always within the area bounded by the feet that are touching the ground • Dynamic Walking • At significant periods during the gait the centre of gravity of the robot is outside of the area bounded by the feet that are touching the ground
History • Dynamic Walking Toys • Static Walking Wind up Toys • Static Walking Robots • Dynamic Walking Robots
Research Labs • MIT AI Lab • Waseda University • HanYang University • Honda Labs • Sony Labs
The Walking Problem • Design a gait sequence in joint space • Provide sensors and actuators at joints • Implement a PID controller at each joint • Command the PID controllers to follow gait sequence
Challenges • Designing gaits that don’t violate the maximum torque available • PID controller will not be able to generate the large torque until the error between the gait and actual joint angle becomes too large. • Gait design is a time consuming process that is difficult to implement online in real time
Raibert’s One Legged Robot • One Legged • Hopping/Running • Simple Dynamic Model
Leg Lab’s Spring Flamingo • Planar biped robot • Linear actuators • Inverted knees • Toe Lift off
Leg Lab’s M2 • 3D biped • Linear actuators
Waseda’s • Early 3D biped
KAIST’s • DC motors • Servomotors • Onboard camera
Singapore Polytechnics Roboerectus • Servomotors • Gait defines servomotor setpoints
Honda’s Asimo & P3 • Commercial humanoid • Well defined tasks • General Intelligence required
Sony’s BP • Entertainment Robot • Commodity Structure • Stereo vision
Designing Gaits • Controlling Balance • when standing, “not required” when walking • Controlling Speed • change step size (swing leg must keep up) • Controlling Height • used to control speed and energy efficiency • Generate intermediate joint angles based on these constraints
Biped Robot Simulators • Kinematic Simulators • for gait design • Dynamic Simulators • for control system testing • Yobotics Simulation Construction Set • dynamic simulation of linked mechanisms