Download
1 / 39
480 likes | 1.44k Views
Rotation of Rigid Bodies. Angular Motion. Angular Motion Definitions. Rotational kinematics : describes rotational motion. Rigid body : idealized model of a body which has a perfectly definite and unchanging shape and size . . Bowling Green. Sydney. Rigid Bodies.

E N D
Angular Motion Definitions • Rotational kinematics: describes rotational motion. • Rigid body: idealized model of a body which has a perfectly definite and unchanging shape and size.
Bowling Green Sydney Rigid Bodies A rigid body is one where all the particles maintain their relative position As the body rotates Each particle moves Relative positions don’t change Cities on the earth are always moving But they don’t get closer together
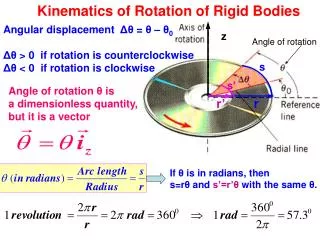
Angular Motion Definitions • First, let’s discuss the rotation of rigid body about a fixed axis. • Fixed axes: axes which is at rest in some inertial frame of reference and does not change direction relative to that frame. • We will usually select the origin of our x-y plane to be in the same as the plane that the rotating object occupies and the origin O corresponded to the location of the axis of rotation. • Then, if we pick a point on the rotating object and draw a line from this point to the origin it will make an angle q with the x-axis. This angle is called the angular position. • The angular displacement will be defined as a change in angularposition, Dq = q2 - q1, during a time interval Dt = t2 - t1. • Both angular position and angular displacement will most commonly be expressed in radians. To convert between radians, revolutions, and degrees use the conversion: • 1 revolution = 2 p radians = 360 degrees
Angular Motion Definitions • One radian is the angle subtended at the center of a circle by an arc with a length equal to the radius of this circle. • Angle θ is subtended by an arc with a length S equal on a circle of the radius r. • Angle in radians is the ratio of two lengths, so it is a pure number (NO dimensions).
Angular Motion Definitions • The average angular velocitywav-z is the angular displacement per unit time • The instantaneous angular velocitywz is the limit of wav-z when Dt approaches zero. This is derivative of angular position with respect to time. • At any instant, every part of a rotating rigid body has the same angular velocity. The angular velocity is positive if the body is rotating in the direction of increasing q and negative if it is rotating in the direction of decreasing q . • Angular velocity will usually be expressed in radians per second (rad/s). Another common unit for angular velocity is revolutions per minute (rpm).
Angular Motion Definitions • Angular velocity is a vector quantity. • The direction of angular velocity is defined using the right-hand rule. • To use this rule, curl the fingers of your right hand in the direction of rotation. Your right thumb then points in the direction of the angular velocity.
Angular Motion Definitions • The average angular accelerationaav-z is change in angular velocity per unit time. • The instantaneous angular accelerationaz is the limit of aav-z when Dt approaches zero. This is also the derivative of angular velocity with respect to time and the second derivative of angular position with respect to time. • Angular acceleration is typically expressed in radians per second squared (rad/s2).
Angular Motion Definitions Just as was the case for linear motion: • the object will be "speeding up" if the angular acceleration is in the samedirection as the angular velocity, and • the object will be "slowing down" if the angular acceleration is in the oppositedirection of the angular velocity.
Angular Motion Definitions • Graph of wz and azversus time for a rotating object • During which time intervals is the rotation "speeding up"? • During which time intervals is the rotation "slowing down"?
Angular Motion Definitions • Graph of wz and azversus time for a rotating object • During which time intervals is the rotation "speeding up"? • During which time intervals is the rotation "slowing down"? Speeding up wz<0 and az<0 Speeding up wz>0 and az>0 Slowing down wz>0 and az<0
Constant AngularAcceleration • For the specialcase of constant angular acceleration the equations which relate angular displacement, angular velocity, angular acceleration and time have the same form as the kinematic equations for constant linear acceleration. • These equations can be obtained from the familiar ones by replacing x with q, vx with wz, and ax withaz. . • t1=0, angular acceleration is constant and equal to average value for any interval: Constant angular acceleration ONLY Constant angular acceleration ONLY
Constant AngularAcceleration • To obtain relation between q and t that doesn’t contain wz: Constant angular acceleration ONLY • To obtain relation between q and wz that doesn’t contain t: Constant angular acceleration ONLY
Relating LinearandAngular Kinematics • Consider a point P on a rotating object that is a distance r away from the axis of rotation. As the object turns through an angle q the point covers a distance given by s = rq • In the above expression the angle q must be in radians • If this expression is differentiated with respect to time then the left hand side will become the linear speed of particle • This speed corresponds to the velocity of the point P which is tangential to the circular arc traced out by the point. When differentiating the right hand side, we notice thatr is constant and the rate of change of angular position is the angular velocity. This gives: Relation between linear and angular speed
Relating LinearandAngular Kinematics • Differentiating once again gives a relationship between the tangential acceleration of the point, atan, and the angular acceleration of the rotation object: Tangential acceleration of a point on a rotating body • Finally, recall that any object that is undergoing circular motion experiences an inwardly directed radial acceleration given by the speed squared divided by the radius. If we replace v=rw we have: Centripetal acceleration of a point on a rotating body
Relating LinearandAngular Kinematics • These equations apply to any particle that has the sametangentialvelocity as a point in a rotatingrigid body • Rope wound around a circular cylinder unwraps without stretching or slipping, its speed and acceleration at any instant are equal to the speed and tangential acceleration of the point at which it is tangent to the cylinder • Bicycle chains and sprockets, belts, pulleys, …
Rotational Inertia (Moment of Inertia) • The rotational inertia of an object is a measure of the resistance of the object to changes in its rotationalmotion • For a system of particles of masses mi at distances ri from an axis passing through a point P the rotational inertia of the system about the axis is given by: Definition of moment of inertia • SI unit of moment of inertia is the kgm2 • For a solid object the rotational inertia is found by evaluating an integral as we will see later • In a rigid body the distances ri are constant, and I is independent of how the body is rotating around a given axis. The rotational inertia of some common shapes about some of their symmetry axes is given in Table 9.2 of your textbook
Rotational Kinetic Energy • The rotational kinetic energy of a solid object rotating about an axis for which its rotational inertia is I with angular velocity w is expressed as Rotational kinetic energy of a rigid body • Notice the similarity between this formula and the formula for the kinetic energy of a point mass m moving with speed v • This kinetic energy is the sum of kinetic energies of the individual particles that make up the rigid body • is in rad/s (NOT in rev or degrees per second ! K will be in Joules) • The greater is the moment of inertia, the greater the kinetic energy of a rigid body rotating with a given angular speed
Rotational Kinetic Energy • Greater a body’s moment of inertia, the harder it is to start the body rotating if it’s at rest and the harder it is to stop its rotation if it’s already rotating
Rotational Kinetic Energy Moments of inertia for different rotation axes • One-piece machine part consists of three heavy connectors linked by light molded struts. • What is the moment of inertia of this body about an axis through point A, to the plane of the slide? • What is the moment of inertia of this body about an axis coinciding the rod BC? • If the body rotates about an axis through A to the plane of the slide with angular speed 4.0 rad/s, what is its kinetic energy?
Rotational Energy. Problems Problem-Solving Strategy • IDENTIFYthe relevant concepts:You can use work–energy relations and conservation of energy to find relations involving position and motion of a rigid body rotating around a fixedaxis. As we saw before, the energy method is usually not helpful for problems that involve elapsed time. Later we will see how to approach rotational problems of this kind. • SET UPthe problem using the following steps: • First decide what the initial and final states (the positions and velocities) of the system are. Use the subscript 1 for the initial state and the subscript 2 for the final state. It helps to draw sketches showing the initial and final states. • Define your coordinate system, particularly the level at which y=0. You will use it to compute gravitational potential energies. Equations assume that the positive direction for y is upward; use this choice consistently. • Identify all non-gravitational forces that do work. A free-body diagram is always helpful. If some of the quantities you need are unknown, represent them by algebraic symbols.
Rotational Energy. Problems Problem-Solving Strategy • SET UP, continued: • List the unknown and known quantities, including the coordinates and velocities at each point. Decide which unknowns are your target variables. • Many problems involve a rope or cable wrapped around a rotating rigid body, which functions as a pulley. • In these situations, remember that the point on the pulley that contacts the rope has the same linear speed as the rope, provided the rope doesn’t slip on the pulley. • You can then take advantage of Equations which relate the linear speed and tangential acceleration of a point on a rigid body to the angular velocity and angular acceleration of the body.
Rotational Energy. Problems Problem-Solving Strategy • EXECUTEthe solution: • Write expressions for the initial and final kinetic and potential energies (K1, K2, U1 and U2) and the non-conservative work Wother (if any). • The new feature is rotational kinetic energy, which is expressed in terms of the body’s moment of inertia I for the given axis and its angular speed instead of its mass m and speed v. • Substitute these expressions into K1+ U1+Wother =K2+U2 (if nonconservative work is done) or K1+ U1=K2+U2 (if only conservative work is done) and solve for the target variable(s). • It’s helpful to draw bar graphs showing the initial and final values of K, U, and E=K+U. • EVALUATEyour answer: • As always, check whether your answer makes physical sense.
Parallel-Axis Theorem • To find the rotational inertia of an object about an axis that is different from one listed in Table 9.2 in your textbook you may be able to use the parallel axis theorem. • This theorem gives the rotational inertia of an object of mass M about an axis, P, that is parallel to and a distance d away from an axis that passes through the object's center of mass. Parallel-Axis Theorem
Parallel-Axis Theorem • Consider two axes, both parallel to z-axis, one through the center ofmass and the other through a point P. • Mass element mi has coordinates (xi, yi) with respect to an axis of rotation through the center of mass and to the plane of the slide. The mass element has coordinates (xi-a, yi-b) with respect to the parallel axis through point P. • Let’s take origin at the CM of the body: • xcm= ycm= zcm=0 • The axis through the CM passes through this thin slice at point O, and parallel axis passes through point P with coordinates (a, b). Then the distance of this axis from axis through CM is d: d2=a2+b2 • Moment of inertia Icmabout axis through O:
Parallel-Axis Theorem • Moment of inertia Icmabout axis through P: • These expressions don’t involve the coordinates zi measured to the slices. Let’s extend the sums to include all particles in all slices. Ip then becomes the moment of inertia of the entire body for an axis through P:
Parallel-Axis Theorem. Example • A part of a mechanical linkage has a mass of 3.6 kg. We measure its moment of inertia about an axis 0.15 m from its center of mass to be Ip=0.132 kg·m2. • What is the moment of inertia Icm about a parallel axis through the center of mass? • Result show that Icm is less than Ip. This is as it should be: the moment of inertia for an axis through the center of mass is lower than for any other parallel axis.
Inertia Calculations • For a continuous distribution of mass the sum of the masses times the square of the distances to the axis of rotation which defines the moment of inertia become an integral. • If the object is divided into small mass elements dm in such a manner that all of the points in a particular mass element are the same perpendicular distance r from the axis of rotation then the moment of inertia is given by . • To evaluate the integral, you need to represent r and dm in terms of the same integration variable. 1-D object, slender rod: use coordinate x along the length and relate dm to an increment dx. 3-D object: express dm in terms of element of volume dV and density . • Limits of integral are determined by the shape and dimensions of the body
Inertia Calculations Uniform thin rod, axis to length • Slender uniform rod with mass M and length L. • Compute its moment of inertia about an axis through O, at an arbitrary distance h from the end. • Choose as an element of mass a short section of rod with length dx at a distance x from O. The ratio of the mass dm of this element to the total mass M is equal to the ratio of its length dx to the total length L: • Evaluate this general expression about an axis through the left end; the right end; through the center. Compare with Table 9.2.
Inertia Calculations • Hollow or solid cylinder, rotating about axis of symmetry • Hollow, uniform cylinder with length L, inner radius R1, outer radius R2. Compute its moment of inertia about the axis of symmetry. • Choose as a volume element a thin cylindrical shell of radius r, thickness dr, and length L. All parts of this element are at very nearly the same distance from the axis. The volume of this element:
Inertia Calculations • Hollow or solid cylinder, rotating about axis of symmetry • If cylinder is solid, R1=0, R2=R: • If cylinder has a very thin wall, R1 and R2 are very nearly equal: • Note: moment of inertia of a cylinder about an axis of symmetry depends on its mass and radii, but not on its length!
Inertia Calculations • Uniform sphere, axis through center • Uniform sphere with radius R. the axis is through its center. Find the moment of inertia about the axis is through the center of this sphere. • Divide sphere into thin disks of thickness dx, whose moment of inertia we already know. The radius r of the disk is • The volume is • The mass is • The moment of inertia for the disk of radius r and mass dm is
Inertia Calculations • Uniform sphere, axis through center • Integrating from x=0 to x=R gives the moment of inertia of the right hemisphere. • From symmetry, the total I for the entire sphere is just twice this: Volume of the sphere The mass M of the sphere • Note: moment of inertia of a solid sphere is less than the moment of inertia of a solid cylinder of the same mass and radius! (Reason is that more of the sphere’s mass is located close to the axis)