Download
1 / 56
1.29k likes | 2.41k Views
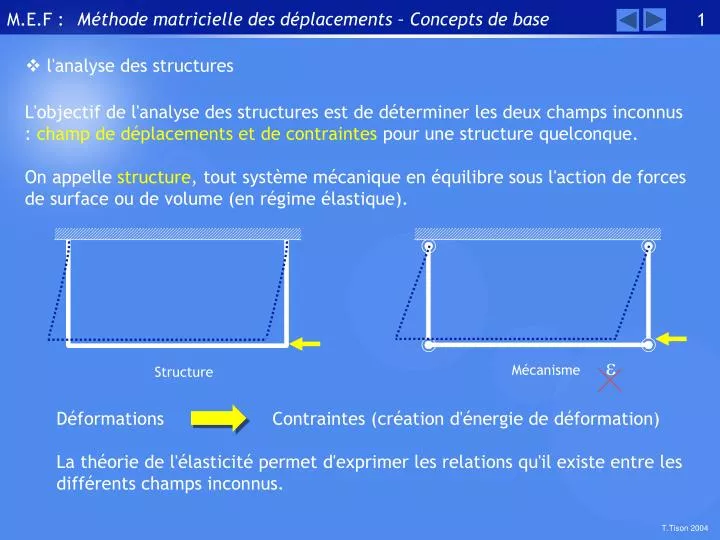
Méthode matricielle des déplacements – Concepts de base. l'analyse des structures. L'objectif de l'analyse des structures est de déterminer les deux champs inconnus : champ de déplacements et de contraintes pour une structure quelconque.

E N D
Méthode matricielle des déplacements – Concepts de base • l'analyse des structures L'objectif de l'analyse des structures est de déterminer les deux champs inconnus : champ de déplacements et de contraintes pour une structure quelconque. On appelle structure, tout système mécanique en équilibre sous l'action de forces de surface ou de volume (en régime élastique). Mécanisme Structure Déformations Contraintes (création d'énergie de déformation) La théorie de l'élasticité permet d'exprimer les relations qu'il existe entre les différents champs inconnus.
Méthode matricielle des déplacements – Concepts de base • Classification des systèmes physiques Un système physique est caractérisé par un ensemble de variables qui peuvent dépendre des coordonnées d'espace et du temps. Certaines variables (d) sont connues, d'autres variables (u) sont inconnues • propriétés physiques • dimensions du système • sollicitations • conditions aux limites • … Un modèle mathématique du système permet d'écrire des relations entre u et d en utilisant des lois physiques. Ces relations constituent un système d'équations en u qu'il s'agit de résoudre. Le nombre de degrés de liberté (d.d.l) du système est le nombre de variables nécessaires pour définir u à un instant t donné. • déplacements • vitesses • températures • contraintes • …
Méthode matricielle des déplacements – Concepts de base Le système est dit : • discret si il possède un nombre fini de degrés de liberté, • continu si il possède un nombre infini de degrés de liberté. L'analyse d'une structure (qu'il s'agisse d'un système discret ou continu) peut-être menée de la façon suivante : 1- Idéalisation du système pour le rendre analysable (discrétisation) 2- Formulation des équations constitutives (équations d'équilibre) 3- Résolution des équations 4- Interprétation des résultats
Théâtre national de Mannheim, 1953 Centre Georges Pompidou à Paris, 1977 Méthode matricielle des déplacements – Concepts de base Pour certains problèmes, la première étape (idéalisation) est (presque) évidente. Structure réelle Structure discrétisée Hangar construit à partir d’éléments préfabriqués en béton armé pour l’aviation italienne, 1940 Le comportement du système discret est représenté par un système d'équations algébriques. Résolution exacte (au sens de la discrétisation)
Méthode matricielle des déplacements – Concepts de base Pour d'autres structures, l'idéalisation n'est pas aussi immédiate (assemblage de plaques ou de coques. On est alors amené à exploiter des techniques d'approximation appropriées. Dans le cas de la M.E.F, le modèle est basé sur une subdivision du domaine continu en sous domaines de formes géométriques simples appelés éléments. Les éléments sont interconnectés entre eux par des points appelés nœuds. Structure réelle Transformation des équations pour obtenir un système d'équations algébriques solution approchée Structure discrétisée élément nœud
Méthode matricielle des déplacements – Concepts de base • Démarche d'analyse d'un système discret (méth. matricielle des déplacements) Idéalisation étape 1 Ecriture des équations d'équilibre pour chaque élément en fonction des déplacements étape 2 Calcul élémentaire Calcul global Cette étape est menée en utilisant des conditions de continuité des déplacements et d'équilibre des forces aux nœuds des éléments Assemblage des caractéristiques élémentaires étape 3 Calcul de la solution étape 4
P1 P2 P3 k4 k1 k2 k3 k5 2 1 3 Méthode matricielle des déplacements – Exemple 1 Analyse statique d'un système constitué de 3 chariots rigides
P1 u1 P2 u2 P3 u3 k4 k3 3 1 2 k5 k1 k2 Méthode matricielle des déplacements – Exemple 1 Etape 1 : idéalisation Système de 3 équations à 3 inconnues • Bilan : • 3 nœuds • 3 ddl : 1 ddl/nœud (u1,u2,u3) • 5 éléments
F1(1) u1(1) 1 k1 / u1 k2u1(2) - k2u2(2) = F1(2) / u2 k2u2(2) - k2u1(2) = F2(2) ou sous forme matricielle : F1(2) u1(2) F2(2) u2(2) 1 2 k2 Méthode matricielle des déplacements – Exemple 1 Etape 2 : Ecriture des équations d'équilibre pour chaque élément • Elément n°1 Ui(j), Fi(j) n° élément n° nœud k1u1(1)=F1(1) • Elément n°2
Elément n°3 • Elément n°4 F2(5) u2(5) F1(3) u1(3) F1(4) u1(4) F2(3) u2(3) F3(5) u3(5) F3(4) u3(4) • Elément n°5 1 2 1 3 3 2 k4 k5 k3 Méthode matricielle des déplacements – Exemple 1
ì + + + = ( 1 ) ( 2 ) ( 3 ) ( 4 ) F F F F P 1 1 1 1 1 ï + + = ( 2 ) ( 3 ) ( 5 ) F F F P í 2 2 2 2 ï + = ( 4 ) ( 5 ) F F P î 3 3 3 Méthode matricielle des déplacements – Exemple 1 Etape 3 : Assemblage des caractéristiques élémentaires P1 u1 P2 u2 P3 u3 k4 k3 3 1 2 k5 k1 k2 F1(1) F1(2) F1(3) F1(4) F2(2) F2(3) F2(5) F3(4) F3(5) 1.Equilibre des forces aux nœuds (équilibre statique de l'ensemble)
ì + + + = ( 1 ) ( 2 ) ( 3 ) ( 4 ) F F F F P 1 1 1 1 1 ï + + = ( 2 ) ( 3 ) ( 5 ) F F F P í 2 2 2 2 ï + = ( 4 ) ( 5 ) F F P î 3 3 3 ì + - + - + - = ( 1 ) ( 2 ) ( 2 ) ( 3 ) ( 3 ) ( 4 ) ( 4 ) k u k u k u k u k u k u k u P 1 1 2 1 2 2 3 1 3 2 4 1 4 3 1 ï - + - + + - = ( 2 ) ( 2 ) ( 3 ) ( 3 ) ( 5 ) ( 5 ) k u k u k u k u k u k u P í 2 1 2 2 3 1 3 2 5 2 5 3 2 ï - + - + = ( 4 ) ( 4 ) ( 5 ) ( 5 ) k u k u k u k u P î 4 1 4 3 5 2 5 3 3 ì = = = = ( 1 ) ( 2 ) ( 3 ) ( 4 ) u u u u u 1 1 1 1 1 ï = = = ( 2 ) ( 3 ) ( 5 ) u u u u í 2 2 2 2 ï = = ( 4 ) ( 5 ) u u u î 3 3 3 Méthode matricielle des déplacements – Exemple 1 En substituant les équations d'équilibre élémentaires 2.Continuité des déplacements :
ì + - + - + - = ( 1 ) ( 2 ) ( 2 ) ( 3 ) ( 3 ) ( 4 ) ( 4 ) k u k u k u k u k u k u k u P 1 1 2 1 2 2 3 1 3 2 4 1 4 3 1 ï - + - + + - = ( 2 ) ( 2 ) ( 3 ) ( 3 ) ( 5 ) ( 5 ) k u k u k u k u k u k u P í 2 1 2 2 3 1 3 2 5 2 5 3 2 ï - + - + = ( 4 ) ( 4 ) ( 5 ) ( 5 ) k u k u k u k u P î 4 1 4 3 5 2 5 3 3 ( ) ( ) + + + - + - = ì k k k k u k k u k u P 1 2 3 4 1 2 3 2 4 3 1 ï ( ) ( ) - + + + + - = k k u k k k u k u P í 2 3 1 2 3 5 2 5 3 2 ï ( ) - - + + = k u k u k k u P î 4 1 5 2 4 5 3 3 + + + - - - æ ö æ ö æ ö k k k k k k k u P ç ÷ ç ÷ ç ÷ 1 2 3 4 2 3 4 1 1 - - + + - = k k k k k k u P ç ÷ ç ÷ ç ÷ 2 3 2 3 5 5 2 2 ç ÷ ç ÷ ç ÷ - - + k k k k u P è ø è ø è ø 4 5 4 5 3 3 Méthode matricielle des déplacements – Exemple 1 On obtient donc le système d'équations recherché
élément 1 Méthode matricielle des déplacements – Exemple 1 Autre solution : écriture des matrices élémentaires avec l'ensemble des ddl. élément 3 élément 5 élément 2 élément 4 å
5 å = ( ) e K K G = 1 e Méthode matricielle des déplacements – Exemple 1 Dans ce cas, on obtient la matrice de rigidité globale à partir de l'expression : matrice de rigidité élémentaire tenant compte de la connectivité Cette expression est valable quel que soit le problème et le nombre d'éléments (à condition de travailler avec des ddl compatibles au niveau des matrices de rigidité élémentaires) Etape 4 : Résolution du problème Les rigidités et les forces externes étant connues, il suffit de résoudre le système linéaire obtenu. Remarque : lorsque les déplacements sont connus, on peut éventuellement calculer les efforts internes à partir des équations d'équilibre élémentaires.
2L L 0.5L Méthode matricielle des déplacements – Exemple 2 Analyse d'un élément de tuyauterie p La tuyauterie doit être capable de résister à une charge importante P lorsque celle-ci est appliquée accidentellement. Analysez le problème
e2 : 8E I e3 : kt e1 : E I 0.5L L 2L e4 : E S Méthode matricielle des déplacements – Exemple 2 Etude simplifiée : on s'intéresse au calcul du déplacement transverse au point d'application de la force. Cette force est supposée quasi-statique. • modélisation par des éléments de type poutre / barre / ressort. • analyse statique. Etape 1 : idéalisation
y ui uj y E, S E, I x L x L vi vj i j Méthode matricielle des déplacements – Matrices élémentaires Matrice de rigidité élémentaire d'une barre en traction - compression dans le plan E:module d'Young (N/m2) – S:section (m2) – L:longueur(m) Matrice de rigidité élémentaire d'une poutre en flexion dans le plan (type Bernoulli : pas de cisaillement transverse) E:module d'Young (N/m2) – I:inertie de flexion (m4) – L:longueur(m)
1 2 3 4 u1 u3 u4 u2 u5 u6 u7 Méthode matricielle des déplacements – Exemple 2 Le modèle devient : Bilan : 4 éléments : 2 poutres, 1 ressort de torsion, 1 barre 4 nœuds 7 ddl
Méthode matricielle des déplacements – Exemple 2 Etape 2 : Ecriture des matrices de rigidité élémentaires pour chaque élément Elément 1 : poutre – (EI,L) Elément 2 : poutre – (8EI,2L)
Méthode matricielle des déplacements – Exemple 2 Etape 2 : Ecriture des matrices de rigidité élémentaires pour chaque élément (suite) Elément 3 : ressort de torsion – (kt) Elément 4 : barre – (E,S,0.5L)
Méthode matricielle des déplacements – Exemple 2 Etape 3 : Assemblage des matrices élémentaires
1 2 3 = K U P G G G 4 ( ) = T U u u u u u u u G 1 2 3 4 5 6 7 ( ) = - T P 0 0 P 0 0 0 0 G u1 u3 u4 u2 u5 u6 u7 = = = u u u 0 1 2 7 Méthode matricielle des déplacements – Exemple 2 Etape 4 : Résolution du problème La solution est obtenue en résolvant le système d'équations linéaires : avec après avoir appliqué les conditions aux limites (conditions de déplacements imposés) :
1 = T E U KU def 2 F = l F K i i i F F T K l = i i F F = T 1 i F F T i i i i l = F F = T K 2 E i i i def Méthode matricielle des déplacements – Propriétés matrice K • On appelle matrice de rigidité d'une structure, la matrice K permettant d'exprimer l'énergie de déformation sous une forme quadratique des déplacements. • Les valeurs propres de la matrice de rigidité sont obtenues en résolvant le problème : • On peut écrire : i : ième valeur propre i : ième vecteur propre si iest tel que : Les valeurs propres d'une matrice de rigidité représentent à un coefficient près l'énergie de déformation mise en jeu par les modes de déformation propres de la structure.
Méthode matricielle des déplacements – Propriétés matrice K • Cas des structures libres (ou avec mécanisme) Dans ce cas, il existe un certain nombre (3 pour les problèmes 2D, 6 pour les problèmes 3D) de valeurs propres nulles. Elles correspondent à des modes de déplacement d'ensemble pour lesquels l'énergie de déformation est nulle. On les appelle des modes de corps rigide ou modes rigides. La matrice de rigidité d'une structure libre est donc semi définie positive Exemple : barre en traction - compression mode de corps rigide mode de compression pure
Méthode matricielle des déplacements – Conditions sur U Prise en compte des conditions de déplacements imposés, 3 possibilités : application d'un "poids" numérique sur les coefficients de la matrice de rigidité Méthode de pénalisation Le système d'équation (KU=P) est complété par des équations de contrainte Multiplicateurs de Lagrange Méthode de la partition
= K U F G G G æ ö U ç ÷ a = U ç ÷ G U è ø b æ ö F ç ÷ a = F ç ÷ G F è ø b æ ö K K ç ÷ aa ab = K ç ÷ G K K è ø ba bb Méthode matricielle des déplacements – Méthode de partition • Principe : • Le système d'équations d'équilibre est constitué sans tenir compte des conditions de déplacements imposés. On obtient un système de la forme : • Le vecteur des déplacements est décomposé (partition) suivant : • On applique cette partition sur le vecteur chargement et la matrice de rigidité : déplacements libres (inconnus) : déplacements imposés (connus) : forces correspondant aux déplacements libres (connues) : forces correspondant aux déplacements imposés (inconnues) réactions
+ = æ ö æ ö æ ö ì K K U F K U K U F ç ÷ ç ÷ ç ÷ aa ab a a = Û aa a ab b a í ç ÷ ç ÷ ç ÷ = + = K K U F R K U K U R è ø è ø è ø î ba bb b b ba a bb b ( ) - = - = - 1 K U F K U U K F K U aa a a ab b a aa a ab b = + R K U K U ba a bb b = - = = 1 R K U U K F K U F ba a a aa a aa a a Méthode matricielle des déplacements – Méthode de partition • En développant les équations d'équilibre, on obtient : • Le premier système d'équations permet d'obtenir les déplacements libres (Ua) : • Les déplacements libres étant connus, on obtient les réactions avec le second système d'équations : • Cas particulier : TOUS les déplacements imposés sont nuls (Ub=0) ou ou
L P E,I v1 v2 1 2 1 1 2 æ ö æ ö v F ç ÷ ç ÷ 1 1 q M ç ÷ ç ÷ 1 1 = = U F ç ÷ ç ÷ G G F v ç ÷ ç ÷ 2 2 ç ÷ ç ÷ q M è ø è ø 2 2 Méthode matricielle des déplacements – Application partition Illustration sur une structure de type "poutre en flexion" Le système d'équations d'équilibre est constitué sans tenir compte des conditions de déplacements imposés. On utilise le modèle : Bilan : 1 élément "poutre en flexion" 2 nœuds avec 2 ddl/nœud 4 ddl
v 1 æ ö æ ö æ ö v v 0 ç ÷ ç ÷ ç ÷ 1 2 = = = q U U ç ÷ ç ÷ ç ÷ 1 b a q q 0 è ø è ø è ø v 1 2 2 q EI v1 v2 2 = K P G 3 L 1 2 -6L -6L 12 -12 -12 6L 6L 12 2L2 -6L 4L2 6L -6L 2L2 4L2 6L æ ö æ ö æ ö F F -P ç ÷ ç ÷ ç ÷ 2 1 = = = = F F R ç ÷ ç ÷ ç ÷ a b M M 0 è ø è ø è ø 2 1 Méthode matricielle des déplacements – Application partition 1 Assemblage de la matrice de rigidité globale : 1 élément immédiat Partition entre déplacements libres (Ua) et déplacements imposés (Ub). Partition du vecteur second membre en efforts appliqués et réactions.
= K G -12 12 6L 6L v v v v 1 1 1 1 -6L 6L 4L2 2L2 q q q q 1 1 1 1 12 -12 -6L -6L v v v v 2 2 2 2 -12 12 6L 6L q q q q -6L 6L 2L2 4L2 2 2 2 2 -6L 6L 4L2 2L2 EI EI 12 -12 -6L -6L = = K K G G 3 3 L L -6L 6L 2L2 4L2 Méthode matricielle des déplacements – Application partition 1 Partition de la matrice de rigidité globale Kaa Kab Kba Kbb
æ ö 3 -PL ç ÷ æ ö æ ö æ ö EI EI æ ö 2 v v -P 3 4 L 6 L L 1 v æ ö æ ö -P 3 EI ç ÷ ç ÷ ç ÷ ç ÷ ç ÷ 2 2 = ´ ´ Û = ç ÷ ç ÷ 2 = Û ç ÷ ç ÷ ç ÷ ç ÷ 3 3 ç ÷ ç ÷ L L q ç ÷ q 2 2 -PL 0 EI 12 L 6 L 12 è ø è ø è ø è ø q 0 è ø è ø 2 2 ç ÷ 2 è ø 2 EI 12 -6L -6L 4L2 -12 6L -6L 2L2 æ ö 3 -PL æ ö L ç ÷ ç ÷ æ ö - F æ ö æ ö æ ö æ ö - F F 12 6 L P P 3 EI ç ÷ 3 ç ÷ 1 = = ç ÷ ç ÷ ç ÷ ç ÷ ç ÷ 1 1 Û = ´ Û = R ç ÷ ç ÷ ç ÷ ç ÷ ç ÷ ç ÷ 2 -PL 1 - M 2 M M 6 L 2 L ç ÷ PL L è ø è ø è ø è ø è ø ç ÷ ç ÷ 1 1 1 è ø è ø 2 EI 2 = = R K U K U F ba a aa a a Méthode matricielle des déplacements – Application partition 1 Calcul des déplacements libres (ici tous les déplacements imposés sont nuls) Calcul des réactions.
- + = P P 0 action réaction action réaction - + = PL PL 0 Déplacements -P P P - - 3 2 PL PL 3 2 EI EI æ ö æ ö v 0 ç ÷ ç ÷ 1 = ç ÷ ç ÷ q 0 è ø è ø 1 0 PL Méthode matricielle des déplacements – Application partition 1 Vérification des résultats Efforts Moments Visualisation des résultats Effort tranchant Moment fléchissant
L L E,I M v1 v2 v3 1 2 1 2 3 1 2 3 æ ö æ ö v F ç ÷ ç ÷ 1 1 q M ç ÷ ç ÷ 1 1 ç ÷ ç ÷ v F ç ÷ ç ÷ 2 2 = = U F G G q ç ÷ ç ÷ M 2 2 ç ÷ ç ÷ v F ç ÷ ç ÷ 3 3 ç ÷ ç ÷ q M è ø è ø 3 3 Méthode matricielle des déplacements – Application partition 2 Structure de type "poutre en flexion" Le système d'équations d'équilibre est constitué sans tenir compte des conditions de déplacements imposés. On utilise le modèle : Bilan : 2 éléments "poutre en flexion" 3 nœuds avec 2 ddl/nœud 6 ddl
v1 v2 v3 1 2 1 2 3 1 2 3 v v 1 1 q q 1 1 v v 2 2 q q EI EI EI 2 2 = = = K K K v G (2) (1) 3 3 3 L L L -12 0 -6L 0 -6L 12 2L2 0 6L 4L2 -6L 0 3 q 3 -6L -12 0 24 12 6L -6L -12 -6L -6L -12 -12 12 -6L 0 -12 6L 12 6L 6L -12 12 -12 6L 12 0 6L 6L -6L 6L 0 2L2 4L2 -6L 0 -6L 2L2 6L 6L 4L2 2L2 4L2 6L 2L2 -6L 2L2 -6L 6L 2L2 0 4L2 -6L 8L2 2L2 4L2 6L v 2 q 2 v 3 q 3 Méthode matricielle des déplacements – Application partition 2 Assemblage de la matrice de rigidité globale :
v1 v2 v3 1 2 3 æ ö æ ö v 0 ç ÷ ç ÷ 1 q æ ö q 0 ç ÷ ç ÷ ç ÷ 2 = 1 = = U U ç ÷ ç ÷ ç ÷ a q b v 0 è ø ç ÷ ç ÷ 3 2 ç ÷ ç ÷ v 0 è ø è ø 3 æ ö æ ö v F ç ÷ ç ÷ 1 1 q M ç ÷ ç ÷ 1 1 ç ÷ ç ÷ æ ö F v F ç ÷ 1 ç ÷ ç ÷ 2 2 = = U F æ ö æ ö M M 0 ç ÷ G G q ç ÷ ç ÷ M ç ÷ 1 = = ç ÷ 2 = = F R F ç ÷ ç ÷ 2 2 ç ÷ ç ÷ ç ÷ b a F M M è ø è ø v F ç ÷ 2 3 ç ÷ ç ÷ ç ÷ 3 3 ç ÷ ç ÷ F è ø q M è ø è ø 3 3 3 Méthode matricielle des déplacements – Application partition 2 Partition entre déplacements libres (Ua) et déplacements imposés (Ub). Partition du vecteur second membre en efforts appliqués et réactions.
= K G q q q q q q v v v v v v 1 1 1 1 2 2 2 2 3 3 3 3 v v 1 1 6L 0 -6L 8L2 2L2 6L 2L2 0 q q -12 12 6L 6L 0 0 1 1 2L2 0 2L2 4L2 0 0 6L -6L v v -6L 6L 4L2 2L2 0 0 2 2 0 6L q q 12 6L -12 0 EI 24 -12 -6L 0 -12 6L 2 2 = -6L -6L EI K = 6L 4L2 -6L 0 K G v v 3 L 0 6L 2L2 8L2 -6L 2L2 3 3 G 3 L q q -12 -6L 24 -12 -12 0 0 -6L 12 -6L 3 3 0 0 -12 12 6L 0 0 2L2 -6L 4L2 Méthode matricielle des déplacements – Application partition 2 Et finalement, partition de la matrice de rigidité globale. Kaa Kab Kba Kbb
EI EI q q æ æ ö ö æ æ ö ö 0 0 ç ç ÷ ÷ ç ç ÷ ÷ 2 2 = = Û Û 3 3 ç ç ÷ ÷ ç ç ÷ ÷ L L q q M M è è ø ø è è ø ø 3 3 6L 0 4 8L2 1 2L2 q - æ ö æ ö 1 ML 2L2 0 ç ÷ ç ÷ 2 = 1 2L2 4L2 2 ç ÷ ç ÷ q 4 14 EI è ø è ø 0 6L 3 -6L -6L 2EI L æ ö - F æ ö æ ö F 3 ç ÷ 1 ç ÷ ç ÷ 1 - M ç ÷ M L ç ÷ ç ÷ M - æ ö 1 ML 1 = = 1 = R ç ÷ ´ Û ç ÷ ç ÷ ç ÷ ç ÷ F F 12 7 L 4 14 EI ç ÷ è ø ç ÷ ç ÷ 2 2 ç ÷ ç ÷ ç ÷ - F F 9 è ø è ø è ø = 3 = 3 R K U K U F ba a aa a a Méthode matricielle des déplacements – Application partition 2 Calcul des déplacements libres (tous les déplacements imposés sont nuls). Calcul des réactions.
-M 7 q - æ ö æ ö 1 ML Réactions ç ÷ Action ç ÷ 2 = Action ç ÷ ç ÷ Réactions q 4 14 EI è ø è ø - M 12 M 18 M 3 + + + = + - + = M F L 2 F L M M 0 + + + = F F F 0 0 1 2 3 7 7 7 1 2 3 -ML 2ML - æ ö æ ö F 3 14EI 7EI ç ÷ ç ÷ 1 - M L ç ÷ ç ÷ M 1 = ç ÷ ç ÷ M F 12 7 L ç ÷ ç ÷ 2 ç ÷ ç ÷ - F 9 è ø è ø 3 Méthode matricielle des déplacements – Application partition 2 Vérification des résultats F2 M F1 F3 On peut vérifier, pour les forces et les moments que : Visualisation des résultats (déplacements)
9M 7L F3 F2 -3M 7L F1 - æ ö æ ö F 3 ç ÷ ç ÷ 1 - M L ç ÷ ç ÷ M 1 = ç ÷ ç ÷ F 12 7 L ç ÷ ç ÷ 2 ç ÷ ç ÷ - F 9 è ø è ø 3 Méthode matricielle des déplacements – Application partition 2 Visualisation des résultats (diagrammes) • Effort Tranchant • Moment Fléchissant F2 2M 7 F1 -M 7 M F3 -M
- æ ö u æ ö 1 1 ES ç ÷ i ç ÷ = = * K U ç ÷ ç ÷ R - u 1 1 L è ø 1 è ø j y uj* x* vj æ ö u ç ÷ i v ç ÷ uj ui* = i U = K ? ç ÷ u R vi j 2 ç ÷ ç ÷ v è ø x j ui Méthode matricielle des déplacements – Transformation des matrices L'objectif est d'établir la matrice de rigidité élémentaire d'un élément lorsque son orientation est différente de celle définie dans le repère de référence. La démarche est illustrée sur un élément de type barre. Dans le repère local R1, la matrice de rigidité de l'élément est donnée par : ui* uj* x* On souhaite formuler la matrice de rigidité de cet élément dans le cas où la barre à une orientation quelconque dans le plan(repère global R2)
ì = q + q * u u cos v sin ï i i i í = q + q * ï u u cos v sin î j j j æ ö u ç ÷ i æ ö q q * v æ ö ç ÷ u cos sin 0 0 ç ÷ i ç ÷ i = ç ÷ ç ÷ ç ÷ q q * u u 0 0 cos sin è ø è ø ç ÷ j j ç ÷ v è ø j y uj* x* vj 1 = * * t E U K U p R 2 uj 1 ui* vi 1 = t E U K U p R x 2 2 ui Méthode matricielle des déplacements – Transformation des matrices On peut écrire les relations entre les déplacements dans les 2 systèmes d'axes par : ou encore sous forme matricielle : U* = T U Dans le repère local, l'énergie de déformation est donnée par : Dans le repère global, l'énergie (identique) est donnée par :
= = * t t t * U U T U TU 1 = * t * E U K U p R 2 1 1 = t t E U T K TU p R 2 1 1 = t E U K U p R 2 2 = t K T K T R R 2 1 Méthode matricielle des déplacements – Transformation des matrices En substituant l'expression de U* en fonction de U dans Expression que l'on compare à On en déduit
- æ ö 1 1 ES ç ÷ = K ç ÷ R - 1 1 y L è ø 1 vj uj q q æ ö cos sin 0 0 ç ÷ = T ç ÷ vi q q 0 0 cos sin è ø ui x æ ö q q q - q - q q æ ö 2 2 u cos cos sin cos cos sin ç ÷ ç ÷ i q q q - q q - q ç 2 2 ÷ v ç ÷ cos sin sin cos sin sin ES = = i U K ç ÷ ç ÷ u - q - q q q q q 2 2 L cos cos sin cos cos sin j ç ÷ ç ÷ ç ÷ ç ÷ v - q q - q q q q 2 2 cos sin sin cos sin sin è ø è ø j - æ ö q q q æ ö 2 A A cos cos sin ES ç ÷ ç ÷ = = K A ç ÷ ç ÷ - q q q 2 A A L cos sin sin è ø è ø Méthode matricielle des déplacements – Transformation des matrices Pour l'élément barre, on obtient : ou encore : avec Attention : pas de ddl de rotation donc liaison pivot aux nœuds implicite
Y 3 2 45° barre 3 Noeuds X Y 1 0 0 barre 4 2 0 L 3 barre 2 3 L L 3 4 L 0 X barre 1 1 4 Méthode matricielle des déplacements – Application synthèse On considère le treillis plan représenté ci-dessous. Il est modélisé par des éléments de type "barre". Les caractéristiques matérielles sont identiques pour toutes les barres (E, S). Les nœuds 1 et 2 sont encastrés. • Établir la matrice de rigidité utile pour le calcul des déplacements sans tenir compte de la barre n°4 • Calculer le déterminant de cette matrice, conclusions. • Calculer et représenter la déformée de la structure complète (barre 4 prise en compte). • Calculer et représenter les réactions aux encastrements. • Calculer les contraintes dans chaque élément.
Élément 1 : 3 2 • Élément 2 : 3 4 2 1 1 4 • Élément 3 : • Élément 4 : Méthode matricielle des déplacements – Application synthèse • Calcul des matrices de rigidité élémentaires
3 2 3 2 1 1 4 Méthode matricielle des déplacements – Application synthèse • Matrice de rigidité utile pour le calcul des déplacements (SANS barre n°4) ddl libres : ddl imposés : La structure n'est pas statiquement stable (présence de pivots implicites aux nœuds). La représentation devrait être :
45° 3 2 3 4 2 1 1 4 Méthode matricielle des déplacements – Application synthèse • Matrice de rigidité utile pour le calcul des déplacements (AVEC barre n°4) ddl libres : ddl imposés :
æ ö æ ö u 0 . 52 ç ÷ ç ÷ 3 - v 4 . 16 ç ÷ ç ÷ PL 3 = ç ÷ ç ÷ u 0 ES ç ÷ ç ÷ 4 ç ÷ ç ÷ - v 4 . 16 è ø è ø 3 = K U F aa a a Méthode matricielle des déplacements – Application synthèse • La résolution du système linéaire donne les déplacements recherchés
u v u v 3 3 4 4 u 1 v 1 u 2 v = R K U 2 ba a Méthode matricielle des déplacements – Application synthèse • Calcul des réactions aux encastrements nœuds 1- 4 nœuds 1- 3 nœuds 2- 3