Download
1 / 23
230 likes | 466 Views
GSI Hybrid EnKF-3DVAR Upgrade. Possible components GPS RO bending angle rather than refractivity Inclusion of compressibility factors for atmosphere Retune SBUV ob errors Update radiance usage flags Prepare for NPP and Metop-B Add GOES-13 data Add Severi CSBT radiance product

E N D
GSI Hybrid EnKF-3DVAR Upgrade • Possible components • GPS RO bending angle rather than refractivity • Inclusion of compressibility factors for atmosphere • Retune SBUV ob errors • Update radiance usage flags • Prepare for NPP and Metop-B • Add GOES-13 data • Add Severi CSBT radiance product • Modification of Radiance bias correction • Satellite monitoring stats code included in Ops. • Improved moisture analysis and add more IASI and AIRS moisture channels • New Sat wind data and QC • NSST analysis in GSI • EnKF hybrid system • Update to current version of trunk
Operational GSI/GFS assimilates refractivity observations up to 30 km. A forward operator to assimilate bending angle observations (a rawer product than refractivity) has been developed and tested. Quality control procedures and observation error characterization have been tuned accordingly. The bending angle code enables the assimilation of GPS RO observations up to 50 km. Algorithms to include the compressibility factors in the computation of the geopotential heights have been included. Will impact other obs that use height. Both refractivity and bending angle codes have the option to use the compressibility factors. GPS RO updatesLidia Cucurull 2
Period: 2 February 2011 – 22 March 2011 PRREF: current operational system – assimilation of refractivities up to 30 km. PRBNDZ: experiment – assimilation of bending angles up to 50 km & use of compressibility factors & updated refractive indices. Both experiments use the current operational GFS model Experiments 3
Moisture modificationsJim Jung • Inclusion of additional tropospheric AIRS and IASI • Modified observational errors for all moisture obs. • Modified background error • Subtle (but important) changes to code
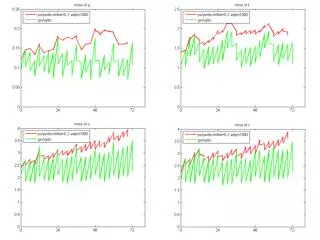
Vertical RMS fit to Raobs Solid Lines = control Dashed Lines = experiment Red = Background Black = Analysis 9 GSI_Meeting 5/10/2011
Time series of RMS fit to RAOBS control experiment 10 GSI_Meeting 5/10/2011
EnKF/3DVar hybrid J : Penalty (Fit to background + Fit to observations + Constraints) x’ : Analysis increment (xa – xb) ; where xb is a background BVar : Background error covariance H : Observations (forward) operator R : Observation error covariance (Instrument + representativeness) yo’ : Observation innovations Jc : Constraints (physical quantities, balance/noise, etc.) B is typically static and estimated a-priori/offline
Motivation from Var • Current background error covariance (applied operationally) in VAR • Isotropic recursive filters • Poor handle on cross-variable covariance • Minimal flow-dependence added • Implicit flow-dependence through linearization in normal mode constraint (Kleist et al. 2009) • Flow-dependent variances (only for wind, temperature, and pressure) based on background tendencies • Tuned NMC-based estimate (lagged forecast pairs)
Hybrid Variational-Ensemble • Incorporate ensemble perturbations directly into variational cost function through extended control variable • Lorenc (2003), Buehner (2005), Wang et. al. (2007), etc. bf & be: weighting coefficients for fixed and ensemble covariance respectively xt: (total increment) sum of increment from fixed/static B (xf) and ensemble B ak: extended control variable; :ensemble perturbation L: correlation matrix [localization on ensemble perturbations]
Hybrid Var-EnKF GFS experiment • Model • GFS deterministic (T574L64; post July 2010 version – current operational version) • GFS ensemble (T254L64) • 80 ensemble members, EnKF update, GSI for observation operators • Observations • All operationally available observations (including radiances) • Includes early (GFS) and late (GDAS/cycled) cycles as in production • Dual-resolution/Coupled • High resolution control/deterministic component • Includes TC Relocation on guess • Ensemble is recentered every cycle about hybrid analysis • Discard ensemble mean analysis • Satellite bias corrections • Coefficients come from GSI/VAR • Parameter settings • 1/3 static B, 2/3 ensemble • Fixed localization: 800km & 1.5 scale heights • Test Period • 15 July 2010 – 15 October 2010 (first two weeks ignored for “spin-up”)
500 hPa Anom.Corr. Northern Hemisphere Southern Hemisphere
Forecast Fits to Obs (Tropical Winds) Forecasts from hybrid analyses fit observation much better.
Dual-Res Coupled Hybrid member 1 forecast member 1 analysis EnKF member update member 2 forecast recenter analysis ensemble member 2 analysis member 3 analysis member 3 forecast GSI Hybrid Ens/Var high res forecast high res analysis Previous Cycle Current Update Cycle
HVEDAS (3D) for GDAS/GFS • Prototype dual-resolution, two-way coupled hybrid Var/EnKF system outperforms standard 3DVAR in GFS experiments • 2010 Hurricane Season (August 15 through October 31 2010) run off-site • Emphasis on AC, RMSE, TC Tracks • Plan underway to implement into GDAS/GFS operationally • Target: Spring 2012 (subject to many potential issues) • Porting of codes/scripts back to IBM P6 • Cost analysis (will everything fit in production suite?) • More thorough (pre-implementation) testing and evaluation • More test periods (including NH winter) • Other/more verification metrics • Potential moratorium associated with move to new NCEP computer/facility • Issues • Weighting between ensemble and static B • Localization • How should EnKF be used within ensemble forecasting paradigm?
Cost • Analysis/GSI side • Minimal additional cost (~2 nodes) • Reading in ensemble (3-9 hour forecast from previous cycle) • Some additional computations in J calculations • 1 additional field • Coding already complete/in place • Additional “GDAS” Ensemble (T254L64 GDAS) • EnKF-based perturbation update • Cost comparable to current analysis [ 8-10 nodes, <40 minutes] • Includes ensemble of GSI runs to get O-F and actual ensemble update step • Work ongoing to optimize coding and scripting • 9hr forecasts, needs to be done only in time for next (not current) cycle
HVEDAS Extensions and Improvements • Expand hybrid to 4D • Hybrid within ‘traditional 4DVAR’ (with adjoint) • Pure ensemble 4DVAR (non-adjoint) • Ensemble 4DVAR with static B supplement (non-adjoint)* • EnKF improvements • Explore alternatives such as LETKF • Adaptive localization and inflation • Non-GFS applications in development • Other global models (NASA GEOS-5, NOAA FIM) • NAM /Mesoscale Modeling • Hurricanes/HWRF • Storm-scale initialization • Rapid Refresh • NCEP strives to have single DA system to develop, maintain, and run operationally (global, mesoscale, severe weather, hurricanes, etc.) • GSI (including hybrid development) is community code supported through DTC • EnKF used for GFS-based hybrid being expanded for use with other applications (not supported by DTC)