Download
1 / 49
490 likes | 583 Views
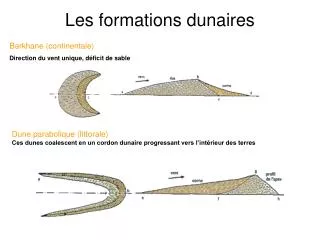
Calibração de Câmeras. Paulo Sérgio Rodrigues PEL205. Revisão de Transformações. Modelo de Translação. Revisão de Transformações. Modelo de Translação. Revisão de Transformações. Modelo de Translação. Revisão de Transformações. Modelo de Escalonamento. Revisão de Transformações.

E N D
Calibração de Câmeras Paulo Sérgio Rodrigues PEL205
Revisão de Transformações • Modelo de Translação
Revisão de Transformações • Modelo de Translação
Revisão de Transformações • Modelo de Translação
Revisão de Transformações • Modelo de Escalonamento
Revisão de Transformações • Modelo de Rotação
Revisão de Transformações • Modelo de Rotação Rotação no Eixo Z
Revisão de Transformações • Modelo de Rotação Rotação no Eixo X
Revisão de Transformações • Modelo de Rotação Rotação no Eixo Y
Revisão de Transformações • Concatenação e Transformação Inversa Onde Aé uma matriz 4 x 4
Revisão de Transformações • Concatenação e Transformação Inversa
Revisão de Transformações • Concatenação e Transformação Inversa
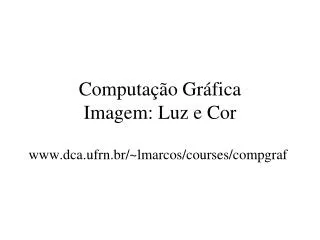
Transformação Perspectiva Coordenadas cartesiana e Coordenadas homogêneas
Transformação Perspectiva Matriz de Transformação em Perspectiva
Transformação Perspectiva Matriz de Transformação em Perspectiva
Transformação Perspectiva Matriz de Transformação em Perspectiva
Transformação Perspectiva Matriz de Transformação em Perspectiva Inversa
Transformação Perspectiva Transformação em Perspectiva: resumo
Transformação Perspectiva ambigüidade colinear
Transformação Perspectiva ambigüidade colinear Resultado Inesperado!!!
Transformação Perspectiva ambigüidade colinear
Transformação Perspectiva ambigüidade colinear
Transformação Perspectiva ambigüidade colinear
Modelo de Câmera • Para alinhar o plano da imagem (x,y) com o plano em • coordenadas do mundo (X,Y), pode-se fazer a seguinte • seqüência de passos: • Translação do suporte para origem, G • Rotação no eixo x, • Rotação no eixo z, • Translação do plano da imagem com relação ao suporte, C
Modelo de Câmera Translação para origem:
Modelo de Câmera Rotação no eixo x Rotação no eixo z
Modelo de Câmera Rotação nos eixos x e z
Modelo de Câmera Translação do plano da imagem com relação ao suporte
Modelo de Câmera Translação para origem: Rotação: Translação:
Modelo de Câmera Combinando as duas translações e as duas rotações:
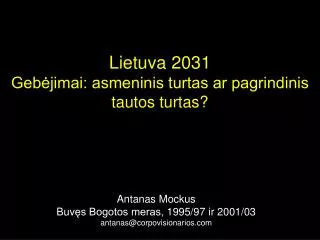
Modelo de Câmera Exemplo Suponha que queiramos encontrar as coordenadas de um dos cantos do bloco da figura abaixo: Nessa posição, a câmera foi Transladada apenas no eixo Z de Z0= 1 m; rotacionado no no mesmo eixo de α = 135o; rotacionado no eixo X de β = 135o; e deslocado no Suporte segundo o vetor r = (0.03, 0.02, 0.035) m. Assuma uma distância focal de λ = 0.035 m.
Modelo de Câmera Exemplo
Modelo de Câmera Exemplo Se o canto em questão possui coordenadas do mundo (X,Y,Z) = (1,1,0.2), as coordenadas no plano da imagem são dadas por: x = 0.0007m y = -0.009m
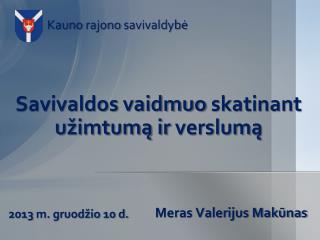
O problema de calibração de câmera • Ache [K] e [R T] • Dados pares de pontos [P] e [p] Padrões com pontos em posições conhecidas
Calibração de Câmera • Calibração de câmera é o processo de determinar quais • os parâmetros da câmera, intrínsecos e extrínsecos, para • um conjunto de coordenadas do mundo e da imagem.
Calibração de Câmera • Um problema que ocorre com imagens 2D, vistas • projetadas no plano de imagem da câmera, é a • ambigüidade colinear.
Calibração de Câmera A = PCRG
Calibração de Câmera Se K = 1 na representação homogênea:
Calibração de Câmera As coordenadas da projeção perspectiva do ponto (X,Y,Z) na forma Cartesiana são:
Calibração de Câmera Substituindo ch1 = xch4e ch2 = ych4 no sistema linear e expandindo, temos: Assumindo ch3 = 0 uma vez que z = 0, temos:
Calibração de Câmera Substituindo ch4na primeira e segunda equações, obtemos duas equações com 12 variáveis!
Calibração de Câmera • O procedimento de calibração consiste então em: • Obter pelo menos 6 pontos de coordenadas do mundo • m ≥ 6 com valores conhecidos (Xi,Yi, Zi) i = 1,2,..,m. Isso gera um • Sistema Linear de 12 equações e 12 incógnitas!
Calibração de Câmera • O procedimento de calibração consiste então em: • (b) Resolver o Sistema Linear para obter os pontos correspondentes • na imagem (xi, yi), i = 1, 2, ..., m.
Calibração de Câmera • O procedimento de calibração consiste então em: • (c) Tendo então a matriz de transformação A da câmera, • pode-se mapear qualquer ponto w do mundo no plano da imagem: p = (xi, yi) w = (X,Y,Z) A P = Aw