Download
1 / 12
120 likes | 196 Views
Taylor polynomi usean muuttujan funktiolle. Yhden muuttujan reaaliarvoiselle funktiolle f(x) tunnetaan (m. asteen) Taylor-polynomi pisteen c ympäristössä , kun f(x):llä on (ainakin) m+1 asteen jatkuvat derivaatat c:n sisältämällä välillä:.

E N D
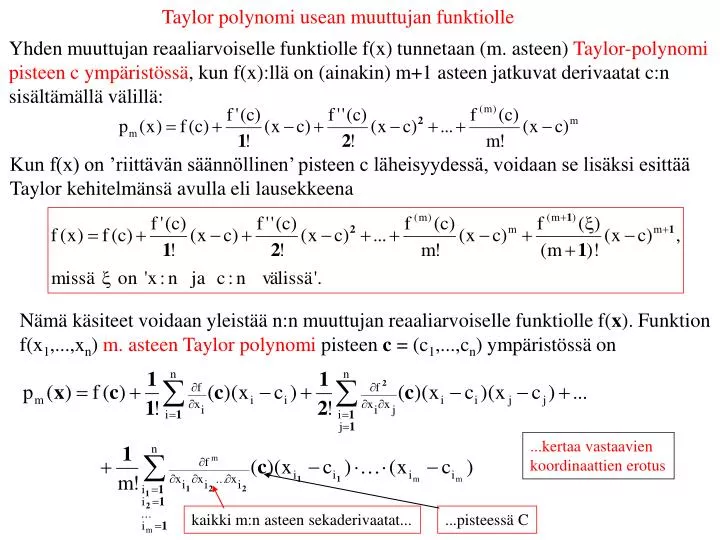
Taylor polynomi usean muuttujan funktiolle Yhden muuttujan reaaliarvoiselle funktiolle f(x) tunnetaan (m. asteen) Taylor-polynomi pisteen c ympäristössä, kun f(x):llä on (ainakin) m+1 asteen jatkuvat derivaatat c:n sisältämällä välillä: Kun f(x) on ’riittävän säännöllinen’ pisteen c läheisyydessä, voidaan se lisäksi esittää Taylor kehitelmänsä avulla eli lausekkeena Nämä käsiteet voidaan yleistää n:n muuttujan reaaliarvoiselle funktiolle f(x). Funktion f(x1,...,xn) m. asteen Taylor polynomi pisteen c = (c1,...,cn) ympäristössä on ...kertaa vastaavien koordinaattien erotus kaikki m:n asteen sekaderivaatat... ...pisteessä C
Erikoistapauksia Taylor polynomista Tarkastellaan kahden muuttujan funktiota f(x,y). Sen ensimmäisen kertaluvun Taylor- polynomi pisteen c = (a,b) ympäristössä on Mutta tämähän on pinnan z = f(x,y) pisteeseen (a, b, f(a,b)) piirretyn tangenttitason yhtälö, jota myös f(x,y):n ensimmäisen kertaluvun approksimaatioksi sanotaan. Kun muistamme, että pinnan z = f(x,y) pisteeseen (a,b,f(a,b)) piirretyn gradienttivektorinf(a,b) lauseke oli f(a,b) = fx(a,b)i + fy(a,b)j (missä luettiin ’nabla’) ja huomaamme, että f(c)·(x – c) = [fx(a,b)i + fy(a,b)j] ·[(x - a)i + (y - b)j] voimme päätellä, että 1. kl. Taylor polynomi voidaan kätevästi esittää gradientin avulla: p1(x) = f(c) + f(c)·(x – c). Tarkemmin ajatellen kyseinen kaava pätee kaikille n:n muuttujan funktioille! Tarkastellaan seuraavaksi kahden muuttujan funktiota f(x,y). Sen toisen kertaluvun Taylor polynomi pisteen c = (a,b) ympäristössä sisältää ’sekaderivaattatermit’ Muodostamalla f(x,y):n Hessen matriisi pisteessä c voidaan todeta (kotitehtävänä!), että Siten toisen kertaluvun Taylor polynomille saadaan lauseke:
Toisen kertaluvun Taylor polynomin lauseke (joka itse asiassa pätee kaikille n:n muuttujan funktioille f(x)): Esimerkki. Laskettava (a) nollannen (b) ensimmäisen ja (c) 2. asteen Taylor-polynomi funktiolle f(x,y) = x3y4 kehityskeskuksessa c = (1,2). (a) 0. asteen Taylorpolynomi on f(c) = 13·24 = 16 (b) 1. asteen Taylorpolynomia varten pitää ’nablata f’ ja laskea pistetulo: Siten 1. asteen Taylor polynomi on p1(x) = 48x + 32y – 96. (c) 2. asteen Taylorpolynomia varten muodostetaan aluksi f:n Hessen matriisi: Siten erityisesti H(1,2) = Lasketaan sitten matriisitulo
2. asteen Taylor polynomi saadaan nyt lisäämällä p1(x):n lausekkeeseen nämä termit: Insinööritieteissä tarvitaan usein mm likiarvoja. Taylor polynomia on helpo integroida, derivoida, laskea raja-arvoja, likiarvoja, jne. jne... Lähellä kehityskeskusta se käyttäytyy likimain kuin alku- peräinen funktio. Hetkonen, mihin näitä Taylor polynomeja oikein tarvitaan?
Usean muuttujan vektoriarvoisista funktioista(Edwards&Penney Luku 13.7) Matriisiteorian yhteydessä lienee jo tutustuttu lineaarikuvauksiin :Rn→Rm (niitä, jotka voidaan esittää matriisikertolaskun avulla AX = Y ja joille (l(x + y)) = l(x) + l(y). Usean muuttujan vektoriarvoinen funktio f kuvaa n-ulotteisia vektoreita m-ulotteisiksi vektoreiksi, esim. on kuvaus f:R3→R5 jonka arvo pisteessä Tässä funktiot sin(x) + cos(y), x2, ez ln(y+z3) ja 2 ovat f:n komponenttifunktiot, merkään niitä seuraavasti: Varoitus: merkintä fi ei ole yksikäsitteinen, sehän voisi tarkoittaa samaa kuin usean muuttujan funktion i:s osittaisderivaatta Jatkossa tarkastellaan yleisiä vektoriarvoisia usean muuttujan funktiota f:Rn→Rm , missä m, n ³ 1. Monet niiden omi- naisuuksista palautuvat kompo- nettifunktioiden ominaisuuksiin:
* f on määritelty pisteessä x0 täsmälleen silloin kuin jokainen komponettifunktio on määritelty tässä lähtöavaruuden Rn pisteessä, ts. f:n määrittelyalue on komponettifunktioiden määrittelyalueiden leikkaus * funktiolla f on raja-arvo pisteessä x0 täsmälleen silloin kun jokaisella komponetti- funktiolla on raja arvo tässä pisteessä, * f on jatkuva pisteessäx0 silloin ja vain silloin kun sen jokainen komponettifunktio on jatkuva tässä pisteessä [vastaavasti f:n jatkuvuus jossakin alueessa]. Esimerkki. Olkoon f:R2→R4 kuvaus 2- ja 4-ulotteisten Euklidisten avaruuksien välillä ja määritelty ehdolla • Mikä on f:n määrittelyjoukko Deff? • Ratkaisu. Tarkastellaan komponettifunktioden • määrittelyjoukkoja: f1 ja f3 on selvästi määritelty aina eli Deff1 = Deff3 = R2. (b) Laske raja-arvo Ratkaisu: Tutkitaan komponettien raja-arvoja:
(c) Miten f(x) tulisi määritellä joukossa, jossa 4x2 = y2, jotta siitä tulisi jatkuva? Ratkaisu. Edellisen raja-arvotarkastelun nojalla ongelmallinen on 4. komponettifunktio. Koska Funktioiden f:Rn→Rm ja g:Rm→Rk yhdistetty funktio on kuvaus g○f:Rn→Rk, joka on määritelty kaavalla Esimerkki. Olkoot funktiot f:Rn→Rm ja g:Rm→Rk määritelty kaavoilla Yhdistetyn funktion määrittelyalue: f:n määrittelyalue on koko R2 taso, mutta g:tä ei ole määritelty, jos x on negatiivinen eli Defg = {(x,y,z)ÎR3, x³0} Siis
Differentioituvuus, kokonaisderivaatta, Jacobin matriisi Olkoon f:Rn→Rm määritelty jossakin n-ulotteisen avaruuden pisteen X0 ympäristössä. Jos on olemassa lineaarikuvas :Rn→Rm [eli itse asiassa matriisi Amn !] ja funktio g:Rn→Rm siten, että tässä ympäristössä on aina voimassa on f differentioituva pisteessä X0. f on differentioituva jossakin alueessa, jos se on differentoituva tämän alueen kaikissa pisteissä Riittävä ehto f:n differentioituvuudelle on kaikkien komponenttifunktioiden fi, i=1,...,m kaikkien osittaisderivaattojen ∂fi/∂xj, j=1,...,n olemassaolo jatkuvina pisteessä X0. Lineaarikuvauksen rooliin tulee silloin funktion f Jacobin matriisi Arvoa Jf(X0) sanotaan funktion f kokonaisderivaataksi pisteessä X0.
Esimerkki. Olkoon funktio f:Rn→Rm määritelty kaavalla Lasketaan sen kokonaisderivaatta pisteessä (x,y,z) = (1, -1, 2): Yhdistetyn funktion derivaatta, yleinen ketjusääntö Yhden muuttujan yhdistetyn funktion derivaatan ketju- sääntö D(g(f(x)) = g’(f(x)f(x) on opittu jo lukiossa, näimme myös derivoinnin ketjusäännön usean muuttujan muuttujan reaaliarvoisille funktioille. Nyt tämä sääntö esitetään kaikkein yleisimmässä muodossaan Jacobin matriisin avulla: Olkoot funktiot f:Rn→Rm ja g:Rm→Rk differentioituvia. Silloin yhdistetyn funktion g○f:Rn→Rk kokonaisderivaatalle pätee: g:n Jacobi pisteessä f(X0) matriisitulo f:n Jacobi pisteessä X0
Esimerkki. Todennetaan kaava 1° Lasketaan ensin yhdistetty funktio g○f ja sitten sen Jacobin matriisi Jg○f: Koska on Jacobin matriisi Jg○f =
2° Lasketaan ensin Jacobin matriisit Jg(f(4,1)) ja Jf((4,1) ja sitten näiden matriisitulo. Tarvitsemme myös arvoa f(4,1) = (4,6,4). Siten matriisituloksi saadaan Sama tulos! Yhdistetyn funktion derivoimiskaavan yleinen todistus on suoraviivainen, mutta teknisesti hankalahko; ensin todetaan että koska f on differentioituva pisteessä X0, on sitä myös yhdistetty funktio. Tämän jälkeen muodostetaan yhdis- tetyn funktion Jacobin matriisi ja tarkastellaan sen paikalla (i,j) olevaa alkiota. Matriisin kertolas- kuominaisuuksista seuraa, että tämä alkio on sama kuin tulomatriisin vastaavalla paikalla oleva alkio.