Download
1 / 9
100 likes | 398 Views
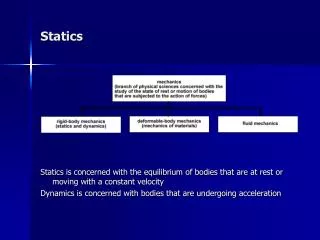
Statics. Chapter 3. External and internal forces. The forces acting on the body of the rigid can be divided into two groups 1) and 2 external forces ) internal forces. 1 - . External forces exerted represent action other bodies on the rigid body into consideration.

E N D
Statics Chapter 3
External and internalforces • The forces acting on the body of the rigid can be divided into two groups 1) and 2 external forces ) internal forces. • 1 - . External forces exerted represent action other bodies on the rigid body into consideration. • 2 - . Internal forces are those that keep the particles that make up units to the rigid body . • 2 - .las internal forces are those units that maintains the particles that form the rigid body .
Principle of transmissibility. equivalent Forces • Transmitting the principle states that the equilibrium conditions or movement of a rigid body remain unchanged if a force F which acts at a given point of that body is replaced by a force F which has the same magnitude and direction but which acts on a different point as long as both have the same action forces .
Vector product of two vectors • To better understand the effect of a force on a rigid body , then introduce a new concept : the moment of a force about a point. • Products vector expressed in rectangular component term • The following will occur to determine the vector product of any of the unit vectors i , j, k were defined in chapter two considering the product ix j . as both vectors have a magnitude equal to 1 and given that they are angled straight with each other , their product vetoresi , j, k are mutually perpendicular and form a right hand triad .
Moments of force about a pointvarigonTheorem • A force F acting on a rigid body . As is known, the force F is represented by a vector that defines the magnitude and direction. However, the effect of the force on the rigid body also depends on its application point . • The distributive property vector products can be used to determine the moment when the various forces resulting from concurrent . If the forces F1 F2 ... forces applied at the same point A , and if the vector r represents the position A, from the equation in section 3.4 it can be concluded that • r X ( F1 + F2 + ... ) = r X r X F1 + F2 + ... • The rectangular components of the moment of a force
Product of twovectors • The dot product of two vectors P and Q is defined as the product of the magnitudes of P and Q and the cosine of the angle 0 formed by PYQ (Figure 3.19). • The escales product of P and Q is denoted by PQ Then , we write • PQ = cos P.Q • Triple mixed product of three vectors • Triple defines a triple scalar product or product mixed three vectors S , P and Q as the scalar expression . • S. ( P x Q ) • Formed which is obtained by the dot product of vector S with the product of P and Q
Moment of force with respect to a given axis • Now that has increased knowledge of vector algebra , we can introduce a new concept : moment of a force about an axis. • Consider again the force F acting on the rigid body and the moment MO of this force with respect to O.
Moments of a pair / equivalentpairs • It is said that two forces Fy- F having the same magnitude and line of action opposite parallel form a pair . Obviously, the sum of the components of the two forces in any direction is equal to zero. • ----------------------------------------------------------------------------------------- • Before establishing two power systems produce the same effect on a rigid body , it must be demonstrated based on experimental evidence that has been presented so far.
Equipotent vector systems • In general, when two vector systems satisfy the equations (3.57 ) O ( 3.58) , that is, when its output and respectively resulting moments about an arbitrary point O are equal, it is said that the two systems are equipotent . Therefore, the result of setting is finished in the previous section can be stated as follows .