Download
1 / 19
190 likes | 274 Views
A Novel Gaussian Sum Filter Method for Accurate Solution to Nonlinear Filtering Problem. Gabriel Terejanu 1 , Peter Scott 1 , Puneet Singla 2 , Tarunraj Singh 2 1 Department of Computer Science & Engineering 2 Department of Mechanical & Aerospace Engineering University at Buffalo

E N D
A Novel Gaussian Sum Filter Method for Accurate Solution to Nonlinear Filtering Problem Gabriel Terejanu1, Peter Scott1, Puneet Singla2, Tarunraj Singh2 1Department of Computer Science & Engineering 2Department of Mechanical & Aerospace Engineering University at Buffalo Buffalo, New York 14260 March 26th, 2008
Weather Prediction Model Dynamical Systems • Dynamical Systems are mathematical models of time evolving physical processes Physical Process Dynamical System (state space representation) • Predictions using Dynamical Systems not accurate: October Surprise Storm Buffalo 2006
Simulation of Dynamical Systems • Knowledge of Governing Dynamics(Equations of motion) • Continuous-time Dynamical Systems • Discrete-time Dynamical Systems • Knowledge of Initial Conditions(Where to start the solution) Different initial states lead to different trajectories
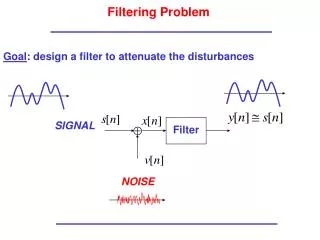
Recursive Estimation / Filtering Reality Abstract • Filtering is the problem of finding the probability density function (pdf) of the states of a system at the current time given all the observations available up to the current time
Bayesian Recursive Estimation Uncertain initial conditions Dynamical System Stochastic forcing Posterior Probability Density Function (Bayes’ Theorem) forecast pdf likelihood
Extended Kalman Filter (EKF) initial pdf forecast pdf posterior pdf EKF Propagation Step EKF Measurement Update
0.3 0.3 0.3 0.5 0.5 0.3 0.2 0.2 0.4 = Gaussian Sum Filter & Motivation • Assumption: covariances are small enough such that the linearizations become representative for the dynamics around the means • Easily violated: strong nonlinearities, computational constraints
0.3 0.5 0.4 0.3 0.5 0.2 0.3 0.3 0.2 ≠ Proposal: Update Forecast Weights Update I: Continuous-time dynamical systems Updates the weights by constraining the Gaussian sum approximation to satisfy the Fokker-Planck equation Update II: Discrete-time nonlinear systems Weights to minimize the integral square difference between the true forecast pdf and its Gaussian sum approximation
Kalman Filtering Applications Numerical Weather Prediction Algorithms Evolution of toxic plumes Source: www.weather.com Source: SCIPUFF Application Computer Vision: Multiple Object Traking Structural Breaks in Hedge Funds Source: B.Han et al. CVPR’05 Source: www.bloomberg.com
Uncertainty Propagation Exact Solution The Fokker-Planck-Kolmogorov equation (FPKE) provides the exact description of the uncertainty propagation problem under white-noise excitation for continuous-time dynamical systems • Analytical solution exists only for stationary pdf and they are restricted to a limited class of dynamical systems • For discrete-time dynamical systems the evolution of the probability density function is given by the Chapman-Kolmogorov equation (CKE) • Difficult to solve and approximate in general case
Update I: Continuous-time • Exact solution given by FPKE • Pdf approximated by a finite sum of Gaussian densities • We want our Gaussian mixture to satisfy the FPKE • Compute FPKE error
Update I: Continuous-time Formulation • New weights obtained by minimizing • Where the matrix L • Evaluate integrals involving Gaussian pdfs over volume V which can be computed exactly for polynomial nonlinearity and in general can be approximated by the Gaussian Quadrature method • The matrix L is positive semi-definite, results convex homogeneous quadratic problem guarantee to have a unique solution
Update II: Discrete-time • Exact solution given by CKE • Forecast pdf approximated by a finite sum of Gaussian densities • We want our Gaussian mixture to approach the true conditional density function • Objective: minimize the error
Update II: Discrete-time Formulation • New weights obtained by minimizing • Where the components of the two matrices • Expectations computed using Gaussian Quadrature, Monte Carlo integration or Unscented Transformation • The matrix M is positive semi-definite, results convex quadratic programming • The cost function has a finite lower bound, results unique solution
Example • Continuous-time dynamical system • Simulation: 8 sec • Measurements available ever 1sec • Results averaged over 100 runs • Expectations in the quadratic programming compute using Gaussian Quadrature
Example cont. • Vary the distance between measurements and the measurement noise variance • Results averaged over 100 runs RMSE surface for GSF with weight update 1 RMSE surface – classic measurement update RMSE surface for GSF with weight update 2
Conclusions • A novel Gaussian Sum Filter with Forecast Weight Update • a more accurate estimate • a better Gaussian Sum approximation to the a posteriori pdf • Update I: Continuous-time dynamical systems • Low computational complexity, optimization only when an estimate has to be computed • Update II: Discrete-time dynamical systems • Implemented also on continuous-time dynamical systems by discretizing the equations of motion • Update methods are useful in the following situations: • Pure prediction (no measurements are available) • The measurement model offers limited information in updating the states • Frequency of the measurements is low • The uncertainty in the measurements is large
GSF Future work Scenario 1 Reduced number of relevant scenarios with high degree of support Probabilistic Argumentation System Scenario 2 Utility Maximization … Scenario N Decision Maker