Download
1 / 54
540 likes | 722 Views
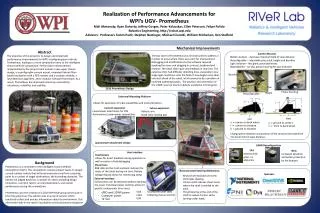
Background. Concurrent access to shared data may result in data inconsistency Maintaining data consistency requires mechanisms to ensure the orderly execution of cooperating processes (i.e., processes share memory or use message passing to cooperate). Example:

E N D
Background • Concurrent access to shared data may result in data inconsistency • Maintaining data consistency requires mechanisms to ensure the orderly execution of cooperating processes (i.e., processes share memory or use message passing to cooperate). • Example: • Recall Producer Consumer problem in Chapter 4 (could only use n-1 elements of the buffer). • New solution adds a variable to track number of items in the buffer.
Race Conditions global shared int counter = 0, BUFFER_SIZE = 10 ; Producer: while (1) { while (counter == BUFFER_SIZE); // do nothing // produce an item and put in nextProduced buffer[in] = nextProduced; in = (in + 1) % BUFFER_SIZE; counter++; }
Race Conditions Consumer: while (1) { while (counter == 0); // do nothing nextConsumed = buffer[out]; out = (out + 1) % BUFFER_SIZE; counter--; // consume the item }
Executed Separately work as expected. • Execute concurrently, causes race condition: • Two or more processes (threads) access shared data concurrently and the outcome of the execution depends on the particular order in which the access takes place.
Consider this execution interleaving of • counter++ and counter-- S0: producer execute register1 = counter {register1 = 5}S1: producer execute register1 = register1 + 1 {register1 = 6} S2: consumer execute register2 = counter {register2 = 5} S3: consumer execute register2 = register2 - 1 {register2 = 4} S4: producer execute counter = register1 {counter = 6 } S5: consumer execute counter = register2 {counter = 4} //final value for this execution sequence
Critical Section Problem • The part of a processes (threads) code that modifies shared data is termed its critical section. • The critical section problem is to design a protocol that the processes can use to handle shared data without causing race conditions. • Each process must request permission to enter into its critical section (entry section). The protocol may also require an exit section. • The rest of the program code is termed the remainder section. We are not concerned with this code.
Program Model while(1) { <entry section> <critical section> <exit section> <remainder> }
Consumer while (1) { while (counter == 0) ; // Entry Section nextConsumed = buffer[out]; out = (out + 1) % BUFFER_SIZE; counter--; //Critical section // consume the item (remainder section) }
Producer while (1) { while (counter == BUFFER_SIZE); // entry section // produce an item and put in nextProduced buffer[in] = nextProduced; in = (in + 1) % BUFFER_SIZE; counter++; //Critical section }
Correct Solutions to Critical-Section Problem • Mutual Exclusion - If process Pi is executing in its critical section, then no other processes can be executing in their critical sections. • No assumptions may be made about speed or number of CPUs. • No process executing in its remainder section can block another process from entering into its critical section. • No process should have to wait forever to enter its critical section.
Attempt 1 shared int turn = 0 ; while (1) while(1) { while (turn !=0) ; while(turn !=1); //entry section critical section ; critical section ; turn = 1 ; turn = 0 ; //exit section <remainder> <remainder> } }
shared int turn = 0 ; P0: P1: while (1) while(1) { while (turn !=0) ; { while(turn !=1); critical_region() ; critical_region() turn = 1 ; turn = 0 ; <remainder> <remainder> } } • P0 accesses CR sets turn to 1. • P1 accesses CR sets turn to 0. In remainder section reads binary equivalent of War and Peace. • P0 enters CR sets turn to 1. • P0 attempts to enter CR but cannot (until after book report due).
Does it meet requirements? • Mutual Exclusion? • Violates rule three.
Attempt 2: Using flag to indicate interest global shared int flag[2] = {0,0} ; while(1) while(1) { flag[0] = 1 ; { flag[1] =1 ; while(flag[1] == 1) ; while(flag[0] ==1 ) ; //entry section <critical section> <critical section> flag[0] = 0 ; flag[1] = 0 ; //exit section <remainder <remainder> } }
Attempt 2: Using flag to indicate interest global shared int flag[2] = {0,0} ; while(1) while(1) { flag[0] = 1 ; { flag[1] =1 ; while(flag[1] == 1) ; while(flag[0] ==1 ) ; //busy wait <critical section> <critical section> flag[0] = 0 ; flag[1] = 0 ; <remainder <remainder> } } • P0 sets flag[0] = 1 gets preempted. • P1 sets flag[1] = 1 gets preempted.
Problem? • Mutual Exclusion? • Progress? • Bounded Wait?
Attempt 2.1: Using flag to indicate interest global shared int flag[2] = {0,0} ; while(1) while(1) {while(flag[1] ==1 ) ; { while(flag[0] == 1) ; flag[0] = 1 ; flag[1] =1 ; <critical section> <critical section> flag[0] = 0 ; flag[1] = 0 ; <remainder <remainder> } }
Attempt 2.1: Using flag to indicate interest global shared int flag[2] = {0,0} ; while(1) while(1) {while(flag[1] ==1 ) ; { while(flag[0] == 1) ; flag[0] = 1 ; flag[1] =1 ; <critical section> <critical section> flag[0] = 0 ; flag[1] = 0 ; <remainder <remainder> } } • P0 reads flag[1] =0 ; Gets preempted. • P1 reads flag[0] = 0 ; Gets preempted. • P0 sets flag[0] = 1 and enters critical_region. • P1 sets flag[1] = 1 and enters critical_region.
Problem? • Mutual Exclusion? • Progress? • Bounded Wait?
Correct for Two Processes while(1) while(1) { flag[0] = 1 ; { flag[1] = 1 ; turn = 1 ; turn = 0 ; while(flag[1]&&turn==1) ; while(flag[0]&&turn==0); <critical section> <critical section> flag[0] = 0 ; flag[1] = 0 ; } }
Correct for Two Processes while(1) while(1) { flag[0] = 1 ; { flag[1] = 1 ; turn = 1 ; turn = 0 ; while(flag[1]&&turn==1) ;//entry while(flag[0]&&turn==0); //entry section <critical section> <critical section> flag[0] = 0 ; // exitflag[1] = 0 ; // exit section. do_boring_things() //Remainder do_interesting_things() // Remainder section } } • P0 sets flag to 1 and turn to 1. Gets preempted. • e.g., reg1 = 1 // ready to store value of 1 to turn. • P1 sets flag to 1 and turn to 0. Gets preempted. • e.g., reg1 = 0 //ready to store value of 0 to turn. • What happens if P0 stores value of turn = 1 and falls into while loop?? • What happens if P1 then stores value of turn = 0 ?
Goal of Critical Sections (Regions) Mutual exclusion using critical regions
Hardware Solutions • Many systems provide hardware support to critical section code. • Simple: Disable interrupts during critical section. • Would this provide mutual exclusion?? • Problems:
Hardware Solutions • Many systems provide hardware support to critical section code. • Simple: Disable interrupts during critical section. • Would this provide mutual exclusion?? • Problems: • Do not want to do this at user level. • Does not scale to multiprocessor system. • OK for OS to do so for short periods of time, not users.
Most machines provide special atomic hardware instructions • Atomic = non-interruptable • Either test memory word and set value • Or swap contents of two memory words
Test and Set Instruction (Busy Waiting) This is a software description of the TestandSet hardware instruction. int lock = 0 ;// global integer var initially set to 0. int TestAndSet (int lock) { return_val = lock ; lock = 1 ; return (return_val); }
Usage: shared int lock = 0 ; while(TestAndSet(lock)) ; //Entry code <critical section> lock = 0 ; //Required for correctness Do_something_else() //Remainder Section
Solutions that minimize busy waiting Producer-consumer problem (Revisited)
Deadlock? Producer: If (count = N) //assume condition true. Preempted Consumer: N-- ; If (count == N-1) wakeup(producer) ; Producer: Sleep() ; //taking the dirt nap
Semaphore • Synchronization tool that does not require busy waiting (spin lock) • Semaphore S – integer variable • Two standard operations modify S: wait() and signal() • Originally called P() andV(), called up and down in text. • Can only be accessed via two indivisible (atomic) operations
typedef struct { int count ; // for mutual exclusion between 2 processes initialize to 1. PCB *Sem_Q ; } Semaphore ;
Use of Semaphores struct Semaphore exclusion = 1 ; while (1) { wait(exclusion) ; //Note: Not a busy wait! <critical section> signal(exclusion) ; <remainder section> }
Semaphore Sem = 1 ; //Initialize counter variable wait(Sem) {Sem.count-- ; if (Sem.count < 0) { Place process on SemQ ; Block process ; } }
Signal(Sem) { Sem.count++ ; if (Sem.count <= 0 ) //someone is sleeping on S.Q { Remove process from SemQ; Place on ready queue ; } }
Example Semaphore Sem_Baby = 1 ; Process Operation Sem.count Result PO wait 0 Passes through P1 wait -1 Blocked P 0 signal 0 removes P1 from SemQ and it passes through the semaphore. semq
Ensuring Mutual Exclusion of Sem Code. shared int lock = 0 ; Semaphore Sem = 1 ; //Initialize count wait(Sem) { while(TestAndSet(lock)) ; //busy loop. Why not a problem?? Sem.count-- ; if (Sem.count < 0) { Place process on SemQ Block process and set lock to 0 } else lock = 0 ; }
Signal(Sem) { while (TestAndSet(lock)) ; //busy wait Sem.count++ ; if (Sem.count <= 0 ) { Remove process from SemQ; Place on ready queue ; } lock = 0 ; }
Deadlock and Starvation • Deadlock – two or more processes are waiting indefinitely for an event that can be caused by only one of the waiting processes • Let S and Q be two semaphores initialized to 1
Semaphore Q, S = {1,1} ; P1: P2: wait(S) ; wait(Q) ; wait(Q) ; wait(S) ; <CS> <CS> signal S ; signal(Q) ; signal Q ; signal(S) ;
Semaphore Q, S = {1,1} ; P0: wait(S) ; // S.count = 0 ; P1: wait(Q) ; //Q.count = 0 ; P0: wait(Q) ; // Q.count = -1; recall: if Q.count < 0 put on Q.semqueue P1: wait(S) ; // S.count = -1; recall: if S.count < 0 put on S.semqueue
Semaphores for Synchronization • Want Statement S1 in P0 to execute before statement S2 in P1. Semaphore Syncher = 0 ; // What does this do? P1: wait(Syncher) ; // Syncher.count = -1 S2 ;
Semaphores for Synchronization • Want Statement S1 in P0 to execute before statement S2 in P1. Semaphore Syncher = 0 ; // What does this do? P0: P1: S1 ; wait(Syncher) ; signal (Syncher) ; S2 ;
Semaphores for Synchronization • Case 1: P1 executes wait first: P1: wait(Syncher) ; //Syncher.count = -1, (put on Syncher.queue) P0: S1 ; signal(Syncher) ; // Syncher.count = 0; take P1 off //Syncher.queue and // place on run queue. // Synchronization accomplished!!
Semaphores for Synchronization • Case 2: P0 executes wait first: P0: S1 ; signal (Syncher) ; //Syncher.count = 1, (put on Syncher.queue) P1: wait (Syncher) ; //Syncher.count = 0. P1 does not have to wait and // executes statement S2. Synchronization // accomplished!!
Semaphores for Synchronization • Want Statement S1 in P0 to execute before statement S2 in P1 before S3 in P2. Semaphore Syncher = 0 ; Semaphore Synch1 = 0 ; P0: P1: P2: S1 ; wait(Syncher) ; wait(Synch1) signal (Syncher) ; S2 ; S3 ; signal(Synch1) ;
global shared int counter = 0, BUFFER_SIZE = 10 ; Producer: while (1) { while (counter == BUFFER_SIZE); // do nothing // produce an item and put in nextProduced buffer[in] = nextProduced; in = (in + 1) % BUFFER_SIZE; counter++; }
Consumer: while (1) { while (counter == 0); // do nothing nextConsumed = buffer[out]; out = (out + 1) % BUFFER_SIZE; counter--; // consume the item }
How can this busy waiting be (largely) avoided? • Use semaphores. • How many semaphores?