Download
1 / 16
170 likes | 356 Views
Data Fusion. Using Active Structure. Interactive Engineering. Data Fusion combines the outputs of sensors of different types to build a better picture of the object being sensed. Simultaneous Sensing.

E N D
Data Fusion Using Active Structure Interactive Engineering
Data Fusion combines the outputs of sensors of different types to build a better picture of the object being sensed
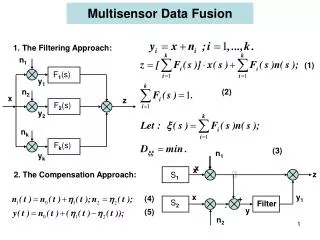
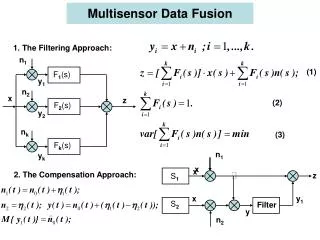
Simultaneous Sensing The sensors may be dynamically configurable (or even dynamically manoeuvrable), and may produce ranges with error estimates. The knowledge will certainly be dynamically configurable, depending on the state of the system, and some connections will be both input and output
Simultaneous Sensing is very much like Constraint Reasoning, except that pruning of alternatives needs to be more general Cutting continues until the sensing system settles, with ranges of numbers, probability spectra, sets of objects and even existence being shuttled backwards and forwards along the connections.
Example Sensing a Tsunami
Causal Sensing The tsunami example is more complicated than simultaneous sensing, in that there is considerable delay between the two sensings and a decision has been made after information from the first sensor has been received. Information from the second type of sensor may validate the decision, leave room for doubt, or negate it.
As with all Data Fusion applications, the sensors may not be in the best possible position to sense what is desired, or to sense anything at all This needs to be built in to the knowledge wrapped around the sensor to transform to the sensed object
Sensor Types Seismometer to sense earthquakes Dart Buoy to measure deep ocean wave amplitude Tide Gauge to measure wave height near land
Single Sensor - Multiple Sensings The seismometer is an example of a sensor that senses four different types of seismic wave - P-Wave, S-Wave, Rayleigh wave, Love wave - in three orthogonal directions, so joining together all the information is already a Data Fusion application (but one that has been automated for the last 20 years) where data from multiple sensors of the same type may not agree. The complexity of the resulting information makes it especially hard to integrate with information from other phenomena.
A network of seismometers senses an earthquake From theses sensors can be deduced the magnitude and the location of the quake A worst case scenario is created of the resulting tsunami and a decision will be made on this partial information Later, the shape of the rupture may be available by inverting the seismometer signals to estimate the size, type and orientation of the source
Tsunami System There is information of doubtful validity at every stage - it needs to be reconciled backwards and forwards
Chimera Building a chimera by mixing sightings - a typical problem of knowledge-poor algorithms - circulating detailed knowledge about the detections would help prevent such mistakes
Variables The seismometer signals are predicting the latitude, longitude, rupture type, length, width, uplift and angle of rupture. From those variables, the wave distance L2 and heights H2 and H3 are estimated. A different rupture type would have the wave at 90 degrees to that shown.
DART Buoy Has Different Value Wrong magnitude or uplift Uneven uplift changes beam angle Wrong rupture location A variety of reasons why a particular value is not found Each reason has a calculable probability Wrong rupture type
Tide Gauge Has Different Value Full energy and shoaling Tide gauge protected Aside from the same reasons as the DART buoy, the location of the tide gauge relative to an island or mainland is important in terms of measured wave amplitude Deep ocean amplitude
Dynamic Assembly of System The seismometer/tide gauge example of Data Fusion requires a system to be dynamically (and automatically) assembled and analysed - while the sensor locations are fixed, the beam heading affects which sensors can be used and their sensitivity, and the heading can only be known within the event being detected Active Structure allows this dynamic assembly and analysis during Data Fusion