Download
1 / 1
10 likes | 88 Views
Motion Tracking System Research and Testing Rochester Institute of Technology. DAVID J. MONAHAN (ME) JAMES K. STERN (ME) JAHANAVI S. GAUTHAMAN (EE) ASSIS E. NGOLO (CE) CORY B. LAUDENSLAGER (EE) BRIAN D. GLOD (CE). BACKGROUND:

E N D
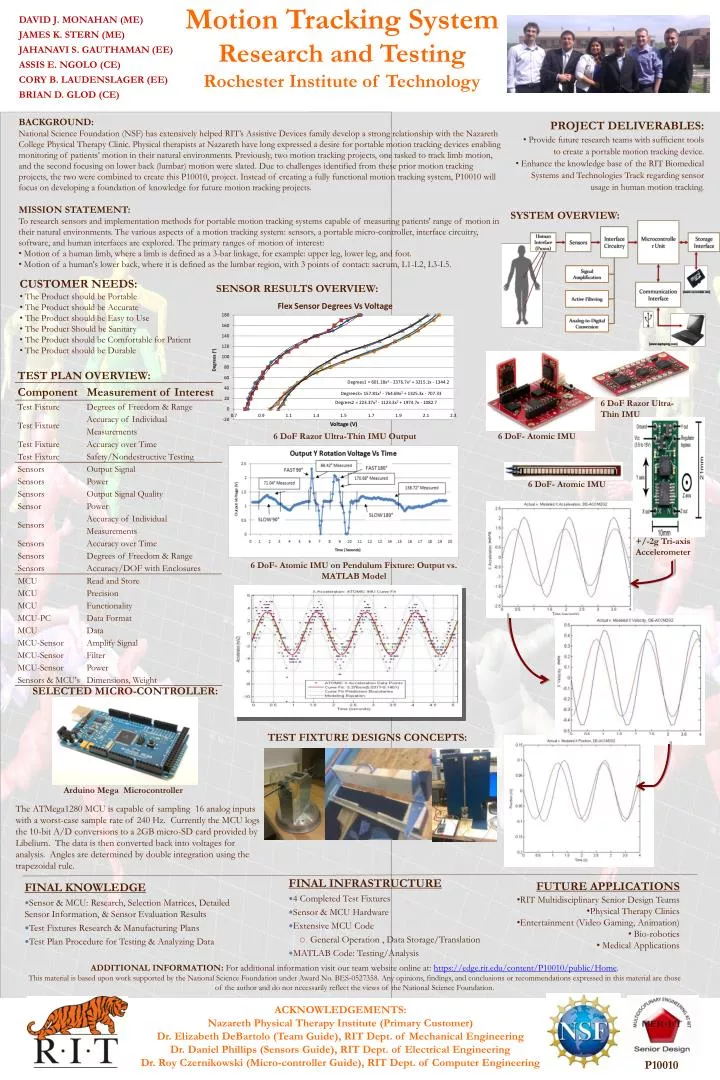
Motion Tracking System Research and Testing Rochester Institute of Technology DAVID J. MONAHAN (ME) JAMES K. STERN (ME) JAHANAVI S. GAUTHAMAN (EE) ASSIS E. NGOLO (CE) CORY B. LAUDENSLAGER (EE) BRIAN D. GLOD (CE) • BACKGROUND: • National Science Foundation (NSF) has extensively helped RIT’s Assistive Devices family develop a strong relationship with the Nazareth College Physical Therapy Clinic. Physical therapists at Nazareth have long expressed a desire for portable motion tracking devices enabling monitoring of patients’ motion in their natural environments. Previously, two motion tracking projects, one tasked to track limb motion, and the second focusing on lower back (lumbar) motion were slated. Due to challenges identified from these prior motion tracking projects, the two were combined to create this P10010, project. Instead of creating a fully functional motion tracking system, P10010 will focus on developing a foundation of knowledge for future motion tracking projects. • MISSION STATEMENT: • To research sensors and implementation methods for portable motion tracking systems capable of measuring patients' range of motion in their natural environments. The various aspects of a motion tracking system: sensors, a portable micro-controller, interface circuitry, software, and human interfaces are explored. The primary ranges of motion of interest: • Motion of a human limb, where a limb is defined as a 3-bar linkage, for example: upper leg, lower leg, and foot. • Motion of a human's lower back, where it is defined as the lumbar region, with 3 points of contact: sacrum, L1-L2, L3-L5. • PROJECT DELIVERABLES: • Provide future research teams with sufficient tools to create a portable motion tracking device. • Enhance the knowledge base of the RIT Biomedical Systems and Technologies Track regarding sensor usage in human motion tracking. • CUSTOMER NEEDS: • The Product should be Portable • The Product should be Accurate • The Product should be Easy to Use • The Product Should be Sanitary • The Product should be Comfortable for Patient • The Product should be Durable SENSOR RESULTS OVERVIEW: SYSTEM OVERVIEW: 6 DoF Razor Ultra-Thin IMU 6 DoF Razor Ultra-Thin IMU Output 6 DoF- Atomic IMU 6 DoF- Atomic IMU +/-2g Tri-axis Accelerometer SELECTED MICRO-CONTROLLER: 6 DoF- Atomic IMU on Pendulum Fixture: Output vs. MATLAB Model Arduino Mega Microcontroller TEST FIXTURE DESIGNS CONCEPTS: The ATMega1280 MCU is capable of sampling 16 analog inputs with a worst-case sample rate of 240 Hz. Currently the MCU logs the 10-bit A/D conversions to a 2GB micro-SD card provided by Libelium. The data is then converted back into voltages for analysis. Angles are determined by double integration using the trapezoidal rule. • ADDITIONAL INFORMATION: For additional information visit our team website online at: https://edge.rit.edu/content/P10010/public/Home. • This material is based upon work supported by the National Science Foundation under Award No. BES-0527358. Any opinions, findings, and conclusions or recommendations expressed in this material are those of the author and do not necessarily reflect the views of the National Science Foundation. FINAL INFRASTRUCTURE • 4 Completed Test Fixtures • Sensor & MCU Hardware • Extensive MCU Code • General Operation , Data Storage/Translation • MATLAB Code: Testing/Analysis • FUTURE APPLICATIONS • RIT Multidisciplinary Senior Design Teams • Physical Therapy Clinics • Entertainment (Video Gaming, Animation) • Bio-robotics • Medical Applications FINAL KNOWLEDGE • Sensor & MCU: Research, Selection Matrices, Detailed Sensor Information, & Sensor Evaluation Results • Test Fixtures Research & Manufacturing Plans • Test Plan Procedure for Testing & Analyzing Data ACKNOWLEDGEMENTS: Nazareth Physical Therapy Institute (Primary Customer) Dr. Elizabeth DeBartolo (Team Guide), RIT Dept. of Mechanical Engineering Dr. Daniel Phillips (Sensors Guide), RIT Dept. of Electrical Engineering Dr. Roy Czernikowski (Micro-controller Guide), RIT Dept. of Computer Engineering P10010