Download
1 / 31

E N D
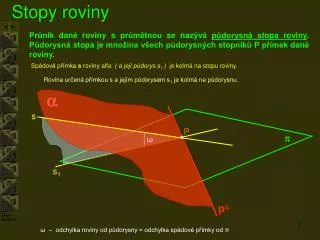
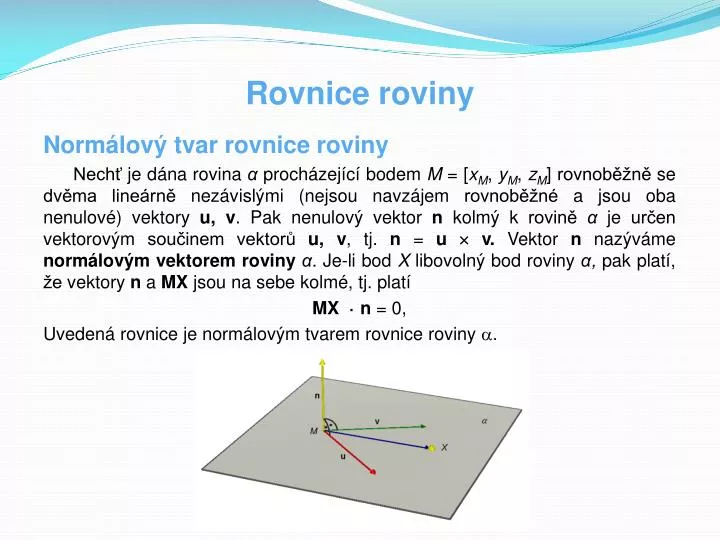
Rovnice roviny Normálový tvar rovnice roviny Nechť je dána rovinaαprocházející bodem M = [xM, yM, zM] rovnoběžně se dvěma lineárně nezávislými (nejsou navzájem rovnoběžné a jsou oba nenulové) vektory u, v. Pak nenulový vektor n kolmý k rovině αje určen vektorovým součinem vektorů u, v, tj. n = u v. Vektor n nazýváme normálovým vektorem rovinyα. Je-li bod X libovolný bod roviny α, pak platí, že vektory n a MX jsou na sebe kolmé, tj. platí MX · n = 0, Uvedená rovnice je normálovým tvarem rovnice roviny .
Obecná rovnice roviny Dosadíme-li do normálového tvaru rovnice roviny souřadnice bodů M = [xM, yM, zM] , X = [x, y, z] a souřadnice normálového vektoru n = (a, b, c), pak dostáváme MX · n = 0, (X – M) · n = 0, (x - xM, y - yM, z - zM) · (a, b, c) = 0, ax + by + cz – (axM + byM + czM) = 0. Označíme-li d = – (axM + byM + czM), získáváme obvyklý tvar obecné rovnice roviny, tj. ax + by + cz + d = 0. Nezapomeňme připomenout, že musí platit (a, b, c) ≠ (0, 0, 0).
Úsekový tvar rovnice roviny Je-li d ≠ 0, tj. neprochází-li rovina počátkem soustavy souřadnic, pak ji lze určit pomocí úseků, které vytíná na souřadnicových osách (této skutečnosti jsme použili při konstrukci stop roviny v Mongeově promítání). Úsekový tvar rovnice roviny odvodíme z obecného tvaru rovnice roviny. Dle stanoveného předpokladu je d ≠ 0, proto můžeme obecný tvar rovnice roviny vydělit číslem d. Potom píšeme ax + by + cz + d = 0, Je-li dále a · b · c ≠ 0, můžeme psát Poté následným dosazením dostáváme rovnici roviny v úsekovém tvaru v níž čísla A, B, C určují úseky, v nichž rovina protíná souřadnicové osy.
Je-li některé číslo z trojice a, b, c rovno nule, pak je rovina rovnoběžná s příslušnou souřadnicovou osou. Např. je-li b = 0 a současně a · c ≠ 0, je daná rovina rovnoběžná s osou y a její úsekový tvar rovnice je Vektorová rovnice roviny Nechť je dána rovina, která prochází bodem M = [xM, yM, zM] a která je rovnoběžná se dvěma lineárně nezávislými vektory u = (u1, u2, u3) a v = (v1, v2, v3). Pak libovolný bod X = [x, y, z] roviny vytvoří s bodem M vektor MX, který je lineární kombinací vektorů u, v. Můžeme tedy psát, že MX = X – M = t u + s v, kdet, s jsou reálná čísla. Uvedená rovnice je vektorovou rovnicí roviny.
Parametrické rovnice roviny Vyjádříme-li z vektorové rovnice roviny bod X, pak platí, že X = M + t u + s v, t, s R. Dosazením souřadnic vektorů u, v a také souřadnic bodu M dostáváme, že pro souřadnice libovolného bodu X roviny platí x = xM+ t u1 + s v1, t, s R. y = yM+ t u2 + s v2 z = zM+ t u3 + s v3 Poznámka: Vyloučením reálných parametrů t, s z parametrického vyjádření roviny dostaneme obecný tvar rovnice roviny. Příklad 2.18: Rovina je dána třemi nekolineárními bodyA = [2, 1, 2], B = [3, 2, 1] a C = [-5, 1, -3]. Zapište normálový, obecný, úsekový, vektorový a parametrický tvar její rovnice. AB = B – A = (3 – 2, 2 – 1, 1 – 2) = (1, 1, – 1) AC = C – A = (– 5 – 2, 1 – 1, – 3 – 2) = (– 7, 0, – 5)
Rovnice přímky Vektorová rovnice přímky Uvažujme přímku p procházející bodem A = [xA, yA, zA] rovnoběžně s nenulovým vektorem a = (a1, a2, a3). Vektor a nazýváme směrovým vektorem přímky p. Libovolný bod X= [x, y, z] ležící na přímce p určí společně s bodem A vektor AX, který musí být násobkem vektoru a. Proto můžeme psát AX = t ·a, kde t je reálné číslo, tzv. parametr bodu X. Parametrické vyjádření přímky Přepíšeme-li vektorovou rovnici přímky pomocí bodů A, X, dostáváme X - A = t ·a, t R, X = A + t ·a,t R. Dosazením souřadnicbodů A, X a vektorua do uvedené rovnice dostaneme trojici tzv. parametrických rovnic přímky x = xA + t · a1, t R y = yA + t · a2 z = zA + t · a3.
Poznámka: Různé body přímky p jsou od sebe odlišeny jinou hodnotou parametru t R. Poznámka: Směrový vektor přímky p není určen jednoznačně. Je-li vektorasměrovým vektorem přímky, pak je jím i vektor s = k·a, kde k ≠ 0 a k R. Kanonický tvar rovnice přímky Jsou-li všechny tři souřadnice směrového vektoru přímky nenulová čísla, můžeme z trojice parametrických rovnic přímky vyjádřit parametr t R, čímž získáme kanonický tvar rovnice přímky Poznámka: Tento systém rovnic je ekvivalentní parametrickým rovnicím přímky.
Přímka jako průsečnice rovin Přímka p může být také určena jako průsečnice dvou rovin , . Potom její rovnice je určena soustavou obecných rovnic rovin , , tj. : a x + b y + c z + d = 0, : a x + b y + cz + d = 0. Uvedená soustava dvou rovnic pro tři neznámé má nekonečně mnoho řešení (ale jen v případě, že roviny nejsou rovnoběžné). Řešení soustavy rovnic závisí na jednom parametru. Odtud pak dostáváme parametrické vyjádření přímky. Poznámka: Směrový vektor a přímky p je kolmý na normálové vektory rovin , , proto může být určen jako jejich vektorový součin a = n n = = n1 n2.
Příklad 2.19: Přímka p je dána svými dvěma body A = [1, -2, -1] a B = [4, -3, 2]. Napište vektorový, parametrický a kanonický tvar její rovnice.
Polohové úlohy Vzájemná poloha dvou přímek Nechť jsou ve trojrozměrném euklidovském prostoru E3 dány dvě přímkyp, q. Každou z přímek p, q určíme bodem a směrovým vektorem. Potom rovnice daných přímek jsou tvaru p: X = P + t u, t R, q: Y = Q +r v, r R. Vzájemnou polohu přímek p, q lze posoudit na základě vlastností vektorůu, va PQ. Klasifikace vzájemné polohy přímek p, q je přehledně zapsána v následujícím schématu.
Vzájemná poloha dvou rovin Nechť jsou ve trojrozměrném euklidovském prostoru E3 dány dvě roviny , . Každou z rovin , určíme bodem a normálovým vektorem. Potom rovnice daných rovin v normálovém tvaru jsou : AX·n= 0, : BY·n = 0. Vzájemnou polohu rovin , lze posoudit na základě vlastností vektorůn, n a AB, kde AB = B – A, přitombod A je bod určující rovinu a bod B je bod určující rovinu . Klasifikace vzájemné polohy dvou rovin , je přehledně zapsána v následujícím schématu.
Vzájemná poloha přímky a roviny Nechť je ve trojrozměrném euklidovském prostoru E3 přímka p dána vektorovou rovnicí p: X = A + t u, tR, a rovina normálovým tvarem rovnice roviny, tj. : BX·n= 0. O vzájemné poloze přímky p a roviny lze rozhodnout na základě skalárního součinu u ·n směrového vektoru u přímkyp a normálového vektoru n roviny a případně i vektoru AB „příčky“ AB. Klasifikace vzájemné polohy přímky a roviny je uvedena v následujícím diagramu.
Příklad 2.20: Určete obecnou rovnici roviny , která je kolmá k přímce p: x = - 3 + 2t, t R, a y = 5 – 4t z = 5 – t prochází bodem A = [-2, -7, -13]. Příklad 2.21: Určete souřadnice průsečíku přímky p: x = 3 – t , t R, s rovinou y = 4t z = -1 + 5t : 5x + y –z + 8 = 0.
Metrické úlohy Vzdálenost dvou bodů A, B Vzdálenost dvou bodů A, B v trojrozměrném euklidovském prostoru E3 je určena velikostí vektoru AB, tj. platí pro ni vzorec kde A[xA, yA, zA] a B[xB, yB, zB]. Vzdálenost bodu A od přímky q Vzdálenost bodu od přímky je možné vypočítat dvěma různými způsoby: a) Bodem A proložíme rovinuρkolmou na přímku q a určíme průsečík M přímky q s rovinou ρ(analogickým způsobem jsme v Mongeově promítání řešili základní úlohu „najít vzdálenost bodu od přímky“). Pro hledanou vzdálenost bodu A od přímky q pak platí d (A, q) = |AM|.
b) Vzdálenost bodu A od přímky q lze vypočítat také pomocí vektorového počtu, resp. pomocí geometrických vlastností vektorového součinu. Předpokládejme, že přímka q je určena bodem B a směrovým vektorem u. BodyA, B určí vektor AB. Vektory AB a u jsou nekolineární a tedy určují rovnoběžník ABCD. Plocha rovnoběžníku ABCD o stranáchAB a u je Odtud pro vzdálenost bodu A od přímky q dostáváme vztah Vzdálenost bodu A od roviny Konstruktivní postup řešení úlohy (viz řešení úlohy v Mongeově promítání) vede k určení paty Q kolmice k vedené z bodu A k rovině . Analogickým způsobem budeme postupovat i při výpočtu vzdálenosti bodu A od roviny .
Tj. bodemA[xA, yA, zA] vedeme kolmici k k rovině . Směrovým vektorem u kolmice k je normálový vektor n roviny , tedy u = n. Pak parametrické rovnice kolmice k jsou tvaru x = xA + t a y = yA + t b z = zA + t c, kde t R a kde a, b, c jsou souřadnice normálového vektoru n roviny . Určíme průsečík Q[xQ, yQ, zQ] kolmice k s rovinou dosazením z parametrického vyjádření přímky do obecné rovnice roviny, tj. Bodu Q odpovídá parametr t0 a tak jej vyjádříme z uvedené rovnice a dostáváme pro něj vztah
Vzdálenost bodu A od roviny je určena vzdáleností bodů A, Q. Proto určíme souřadnice vektoru AQ, tj. odtud
Vzdálenost dvou rovnoběžných přímek p a q Vzdálenost dvou rovnoběžných přímek p a q můžeme určit jako vzdálenost zvoleného bodu na jedné z daných přímek od druhé přímky. Tj. úlohu můžeme převést na vypočtení vzdálenosti bodu od přímky a odtud platí, že d (p, q) = d (A, q). Vzdálenost přímky p od rovnoběžné roviny Vzdálenost přímky p od rovnoběžné roviny se rovná vzdálenosti zvoleného bodu přímky p od dané roviny.Tj. úlohu můžeme převést na vypočtení vzdálenosti bodu od roviny a odtud platí, že d (p, ) = d (A, ).
Vzdálenost dvou rovnoběžných rovin , Vzdálenost dvou rovnoběžných rovin , se rovná vzdálenosti zvoleného bodu v jedné rovině od druhé roviny. Tj. úlohu můžeme převést na vypočtení vzdálenosti bodu od roviny a odtud platí, že d (, ) = d (A, ). Jsou-li obě roviny , dány obecnými rovnicemi, upravíme je tak, aby obě měly stejný normálový vektor, tedy Zvolíme-li v rovině bod Q[x0, y0, z0], musí pro jeho souřadnice platit Použitím vzorce pro vzdálenost bodu Q od roviny dostaneme
Příklad 2.22: Určete vzdálenost bodu A = [1, 0, 0]od přímky p: x = 2 – t , t R. y = t z = 0 1. způsob: A = [1, 0, 0] B = [2, 0, 0] AB = B – A = (1, 0, 0) u = (-1, 1, 0)
2. způsob: a) Daným bodem A = [1, 0, 0] proložíme rovinu αkolmou k přímce p: b) Vypočteme souřadnice průsečíku P přímky p s rovinou α: c) Vypočteme velikost úsečky AP:
Příklad 2.23: Určete vzdálenost bodu M = [3, -1, 3]od roviny : 3x – 4z + 5 = 0.
Odchylky přímek a rovin Odchylka dvou přímek Velikost úhlu φ, který svírají směrové vektory u, v přímek p, q, určíme z definice skalárního součinu. Volíme-lipro přímky 0° ≤ φ ≤ 90 °, resp. 0 ≤ φ ≤ /2, musíme se omezit na absolutní hodnotu skalárního součinu, tj. Odchylka dvou rovin Odchylkaφdvou rovin , je určena odchylkou jejich normál. Platí tedy
Odchylka přímky a roviny Odchylka φpřímky p od roviny je úhel, který svírá přímka p a její pravoúhlý průmět p0 do roviny . Odchylka přímky od roviny je dána vzorcem kde nαje normálový vektor roviny , u je směrový vektor přímky p a je úhel, který svírá normálový vektor nαroviny a směrový vektor u přímky p. Přitom platí, že
Příklad 2.24: Určete odchylku dvou rovin : 2x – y + z - 1 = 0 a : x + y + 2z + 3 = 0 .
Daniela Bímová Obrázky v programu Cabri 3D byly sestrojeny za podpory projektu FRVŠ 400/2012