Download
1 / 21
210 likes | 693 Views
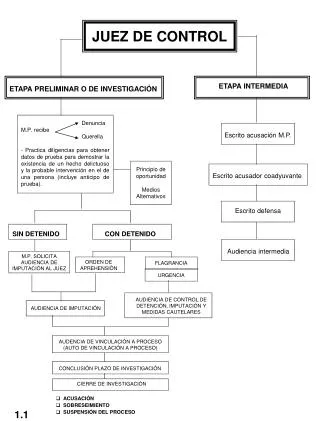
Subsistemas de Control. Retroalimentaci?n negativa y autocontrolCuando la informaci?n de salida de un sistema se hace retornar a la entrada del sistema, con el fin de proporcionar informaci?n a los centros decisionales del sistema y estos toman las acciones correctivas que hacen que el sistema r

E N D
1. Subsistemas de Control Los sistemas en general poseen una caracter�stica que los lleva a no solo permanecer sino a crecer y expandirse (principio de organicidad). Para poder llevar a cabo esta funci�n es indispensable que se desarrolle una capacidad de adaptaci�n con el entorno que rodea al sistema, es decir, debe controlar su conducta con el fin de regularla de un modo conveniente para su supervivencia, y esto lo logra a trav�s de : retroalimentaci�n negativa y autocontrol.
2. Subsistemas de Control Retroalimentaci�n negativa y autocontrol
Cuando la informaci�n de salida de un sistema se hace retornar a la entrada del sistema, con el fin de proporcionar informaci�n a los centros decisionales del sistema y estos toman las acciones correctivas que hacen que el sistema retorne a su camino original y obtener una corriente modificada, se dice que existe un proceso de retroalimentaci�n negativa
3. Subsistemas de Control Sistema de control retroalimentado
Es aquel que tiende a mantener una relaci�n preestablecida entre la salida y la entrada de referencia, comparando ambas y utilizando la diferencia como par�metro de control
Sistema de Lazo cerrado
Un sistema de lazo cerrado es aquel en que la se�al de salida tiene efecto directo sobre la acci�n de control. Esto es los sistemas de lazo cerrado son sistemas de control retroalimentado
4. Subsistemas de Control
5. Subsistemas de Control Elementos que constituyen un sistema de control retroalimentado y de lazo cerrado
Existen 5 elementos principales que se pueden distinguir en un sistema de este tipo y son:
a) Variable: que es el elemento o programa de objetivos que se desea controlar
b) Mecanismos sensores: que son sensibles para medir las variaciones o los cambios de variable
6. Subsistemas de Control c) Medios motores: a trav�s de los cuales se pueden desarrollar las acciones correctivas
d) Fuente de energ�a: que estrega la energ�a necesaria para cualquier tipo de actividad
e) Retroalimentaci�n: mediante la cual, a trav�s de la comunicaci�n del estado de la variable de sensores, se logran llevar a cabo las acciones correctivas
7. Subsistemas de Control Diagrama de bloques:
Un sistema de control puede consistir de una cantidad de componentes, y con el objeto de mostrar las funciones cumplidas por cada uno de ellos, se acostumbra utilizar un diagrama denominado DIAGRAMA DE BLOQUES, el cual permite representar gr�ficamente:
a) las funciones realizadas por cada componente
8. Subsistemas de Control b) El flujo de se�ales
c) las interrelaciones entre los componentes
d) Las variables del sistema son enlazadas a trav�s de bloques funcionales
e) Permite ver f�cilmente el funcionamiento de un sistema, al contener informaci�n con respecto al funcionamiento del sistema y no de la contituci�n fisica del mismo
f) la fuente de energ�a no aparece indicada
9. Subsistemas de Control Caracter�sticas de los sistemas de control retroalimentado negativamente y de lazo cerrado
a) No es muy sencillo identicar sus elementos
b) los elementos deben ser los suficientemente sensitivos y r�pidos como para satisfacer los requisitos espec�ficos para cada funci�n o elementos de control
c) los sistemas tienden a mantener una conducta relatimavente estable
10. Subsistemas de Control d) permite dejar en libertad los niveles operacionales para determinar la variable y solo tomar acci�n cuando la variable a salido de sus valores permitidos
e) Mantienen los objetivos constantes a partir de la modificaci�n de la conducta.
11. Subsistemas de Control Retroalimentaci�n positiva
Cuando la acci�n sigue a la recepci�n de la comunicaci�n de retroalimentaci�n, va dirigida a apoyar la direcci�n o el comportamiento inicial, tenemos una retroalimentaci�n positiva. Es decir, cuando mantenemos la acci�n y modificamos los objetivos, estamos utilizando la retroalimentaci�n positiva
12. Subsistemas de Control
13. Subsistemas de Control Caracter�sticas:
a) El control es pr�cticamente imposible, ya que no se tienen est�ndares de comparaci�n
b) Se tiene una constante modificaci�n de los objetivos
c) El proceso de coordinaci�n de actividades es d�ficil de coordinar.
14. Subsistemas de Control Sistemas Desviaci�n-Amplificaci�n y Sistemas desviaci�n-correcci�n
Existen sistemas cuyo efecto es encerrar procesos de relaciones causales mutuas que amplifican el estado inicial que puede ser insignificante y causal, y producen una desviaci�n y divergen de la condici�n inicial, dado que poseen una retroalimentaci�n positiava, a este tipo de sistemas se llama Sistemas Desviaci�n-Amplificaci�n o morfogenesis
15. Subsistemas de Control Mientras a los que la desviaci�n es corregida y se mantienen en equilibrio, dado que su retroalimentaci�n es positiva se le conoce como sistemas de desviaci�n correcci�n o morfostasis.
16. Subsistemas de Control El proceso de casulidad mutua
Existe un casualidad mutua
Cuando el tama�o de la influencia en una direcci�n tiene un efecto sobre el tama�o de la influencia en la otra direcci�n y es a su vez afectada por ella.
No existe casualidad mutua si:
Si el tama�o de la influencia en una direcci�n es independiente del tama�o de la influencia en otra direcci�n.
17. Subsistemas de Control El proceso de casualidad mutua no necesariamente se debe asociar con la retroalimentaci�n
Bajo ciertas circunstancias un circuito desviaci�n-amaplificaci�n se puede transformar en un circuito desviaci�n-correcci�n
En general, un circuito con un n�mero par de influencias negativas es de desviaci�n-amplificaci�n, y son un n�mero impar el del tipo amplificaci�n-correcci�n
18. Subsistemas de Control
19. Subsistemas de Control Sistema de lazo cerrado con amplificaci�n
Se entiende que un sistema con amplificaci�n ocurre cuando con peque�o cambio en la entrada, puede hacer entrar en operaciones varias fuentes de energ�a, y por lo tanto producir un salida que puede ser bastante diferente de la de entrada.
20. Subsistemas de Control
21. Subsistemas de Control En resumen las caracteri�sticas de un sistema de control son:
a) Un control requiere la presencia de la influencia de retroalimentaci�n negativa
b) Control estable de una variable en un punto fijo generalmente significa mantener la variable a tal modo que no se eleje m�s alla de ciertos l�mites aceptable alrededor de ese punto
c) Para que un control sea efectivo, se debe dise�ar de modo que sus respuestas sean adecuadas