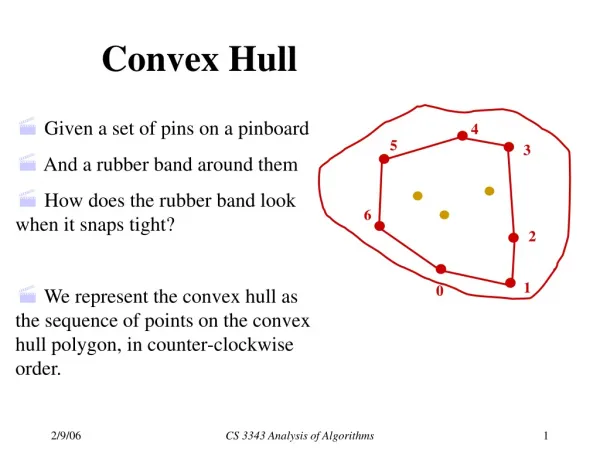
Download

1 / 71
730 likes | 867 Views
Convex Programming. Brookes Vision Reading Group. Huh?. What is convex ??? What is programming ??? What is convex programming ???. Huh?. What is convex ??? What is programming ??? What is convex programming ???. Convex Function. f(t x + (1-t) y) <= t f(x) + (1-t) f(y). Convex Function.

E N D
Convex Programming Brookes Vision Reading Group
Huh? • What is convex ??? • What is programming ??? • What is convex programming ???
Huh? • What is convex ??? • What is programming ??? • What is convex programming ???
Convex Function f(t x + (1-t) y) <= t f(x) + (1-t) f(y)
Convex Function Is a linear function convex ???
Convex Set Region above a convex function is a convex set.
Convex Set Is the set of all positive semidefinite matrices convex??
Huh? • What is convex ??? • What is programming ??? • What is convex programming ???
Objective function Example Constraints Programming • Objective function to be minimized/maximized. • Constraints to be satisfied.
Example Optimal solution Vertices Objective function Feasible region
Huh? • What is convex ??? • What is programming ??? • What is convex programming ???
Convex Programming • Convex optimization function • Convex feasible region • Why is it so important ??? • Global optimum can be found in polynomial time. • Many practical problems are convex • Non-convex problems can be relaxed to convex ones.
Convex Programming • Convex optimization function • Convex feasible region • Examples ??? • Linear Programming • Refer to Vladimir/Pushmeet’s reading group • Second Order Cone Programming • What ??? • Semidefinite Programming • All this sounds Greek and Latin !!!!
Outline • Convex Optimization • Second Order Cone Programming (SOCP) • Semidefinite Programming (SDP) • Non-convex optimization • SDP relaxations • SOCP relaxations • Optimization Algorithms • Interior Point Method for SOCP • Interior Point Method for SDP 2 out of 3 is not bad !!!
Outline • Convex Optimization • Second Order Cone Programming (SOCP) • Semidefinite Programming (SDP) • Non-convex optimization • SDP relaxations • SOCP relaxations • Optimization Algorithms • Interior Point Method for SOCP • Interior Point Method for SDP
Second Order Cone • || u || < t • u - vector of dimension ‘d-1’ • t - scalar • Cone lies in ‘d’ dimensions • Second Order Cone defines a convex set • Example: Second Order Cone in 3D x2 + y2 <= z2
Hmmm ICE CREAM !! x2 + y2 <= z2
Linear Objective Function Affine mapping of SOC Second Order Cone Programming Minimize fTx Subject to || Ai x+ bi || <= ciT x + di i = 1, … , L Constraints are SOC of ni dimensions Feasible regions are intersections of conic regions
Why SOCP ?? • A more general convex problem than LP • LP SOCP • Fast algorithms for finding global optimum • LP - O(n3) • SOCP - O(L1/2) iterations of O(n2∑ni) • Many standard problems are SOCP-able
SOCP-able Problems • Convex quadratically constrained quadratic programming • Sum of norms • Maximum of norms • Problems with hyperbolic constraints
SOCP-able Problems • Convex quadratically constrained quadratic programming • Sum of norms • Maximum of norms • Problems with hyperbolic constraints
QCQP Minimize xT P0 x + 2 q0T x + r0 Subject to xT Pi x + 2 qiT x + ri Pi >= 0 || P01/2 x + P0-1/2 x ||2 + r0 -q0TP0-1p0
QCQP Minimize xT P0 x + 2 q0T x + r0 Subject to xT Pi x + 2 qiT x + ri Minimize t Subject to || P01/2 x + P0-1/2 x || < = t || P01/2 x + P0-1/2 x || < = (r0 -q0TP0-1p0)1/2
SOCP-able Problems • Convex quadratically constrained quadratic programming • Sum of norms • Maximum of norms • Problems with hyperbolic constraints
Sum of Norms Minimize || Fi x + gi || Minimize ti Subject to || Fi x + gi || <= ti Special Case: L-1 norm minimization
SOCP-able Problems • Convex quadratically constrained quadratic programming • Sum of norms • Maximum of norms • Problems with hyperbolic constraints
Maximum of Norms Minimize max || Fi x + gi || Minimize t Subject to || Fi x + gi || <= t Special Case: L-inf norm minimization
SOCP-able Problems • Convex quadratically constrained quadratic programming • Sum of norms • Maximum of norms • Problems with hyperbolic constraints
Hyperbolic Constraints x >= 0 , y >= 0 w2 <= xy || [2w; x-y] || <= x+y
Outline • Convex Optimization • Second Order Cone Programming (SOCP) • Semidefinite Programming (SDP) • Non-convex optimization • SDP relaxations • SOCP relaxations • Optimization Algorithms • Interior Point Method for SOCP • Interior Point Method for SDP
Linear Objective Function Linear Constraints Semidefinite Programming Minimize C X Subject to Ai X = bi X >= 0 Linear Programming on Semidefinite Matrices
Why SDP ?? • A more general convex problem than SOCP • LP SOCP SDP • Generality comes at a cost though • SOCP - O(L1/2) iterations of O(n2∑ni) • SDP - O((∑ni)1/2) iterations of O(n2∑ni2) • Many standard problems are SDP-able
SDP-able Problems • Minimizing the maximum eigenvalue • Class separation with ellipsoids
SDP-able Problems • Minimizing the maximum eigenvalue • Class separation with ellipsoids
Minimizing the Maximum Eigenvalue Matrix M(z) To find vector z* such that max is minimized. Let max(M(z)) <= n max(M(z)-nI) <= 0 min(nI - M(z)) >= 0 nI - M(z) >= 0
Minimizing the Maximum Eigenvalue Matrix M(z) To find vector z* such that max is minimized. Max -n nI - M(z) >= 0
SDP-able Problems • Minimizing the maximum eigenvalue • Class separation with ellipsoids
Outline • Convex Optimization • Second Order Cone Programming (SOCP) • Semidefinite Programming (SDP) • Non-convex optimization • SDP relaxations • SOCP relaxations • Optimization Algorithms • Interior Point Method for SOCP • Interior Point Method for SDP
Non-Convex Problems Minimize xTQ0x + 2q0Tx + r0 Subject to xTQix + 2qiTx + ri < = 0 Qi >= 0 => Convex Non-Convex Quadratic Programming Problem !!! Redefine x in homogenous coordinates. y = (1; x)
Let’s solve this now !!! Non-Convex Problems Minimize xTQ0x + 2q0Tx + r0 Subject to xTQix + 2qiTx + ri < = 0 Minimize yTM0y Subject to yTMiy < = 0 Mi = [ ri qiT; qi Qi]
Non-Convex Problems • Problem is NP-hard. • Let’s relax the problem to make it convex. • Pray !!!
Outline • Convex Optimization • Second Order Cone Programming (SOCP) • Semidefinite Programming (SDP) • Non-convex optimization • SDP relaxations • SOCP relaxations • Optimization Algorithms • Interior Point Method for SOCP • Interior Point Method for SDP
Bad Constraint !!!! No donut for you !!! SDP Relaxation Minimize yTM0y Subject to yTMiy < = 0 Minimize M0 Y Subject to Mi Y < = 0 Y = yyT
SDP Problem SDP Relaxation Minimize yTM0y Subject to yTMiy < = 0 Minimize M0 Y Subject to Mi Y < = 0 Y >= 0 Nothing left to do …. but Pray Note that we have squared the number of variables.
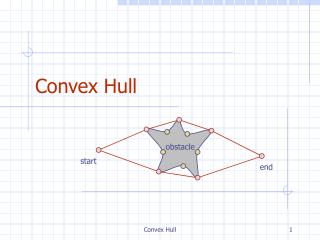
Example - Max Cut • Graph: G=(V,E) • Maximum-Cut