Download
1 / 23
270 likes | 499 Views
Intelligent Space Surveillance Network (SSN) Scheduling. AIAA@Infotech 2012. Presented by: Dick Stottler stottler@StottlerHenke.com 650-931-2714. Space Surveillance Network Scheduling. Resources: ground & space-based radar & E/O sensors Dedicated, Collateral, Contributing

E N D
Intelligent Space Surveillance Network (SSN) Scheduling AIAA@Infotech 2012 Presented by: Dick Stottler stottler@StottlerHenke.com 650-931-2714
Space Surveillance Network Scheduling • Resources: ground & space-based radar & E/O sensors • Dedicated, Collateral, Contributing • Plan/schedule observations (metric/SOI) of known objects, & surveillance • Currently tracking tens of thousands of objects • Automatic capability needed for DCS/SSA scenarios • Inputs: tracked object observation opportunities and desired tracking/metrics/SOI/objectives, surveys and time constraints • Output assignment of resources to tasks for time periods, if possible • During potential attacks/problems, rapidly adjust (replan)
SSN Scheduling Challenges • Antiquated/unique computer HW/software/scheduler at sensor • Prevents Automated Real-Time Response (Human responds) • Prevents (or at least hinders) globally optimized scheduling • Non-dedicated sensors, sharing with other missions • Non-Taskable sensors (e.g. space fences) • Balancing need: complementary metric info & SOI & surveys • Probabilistic results (calculated probability of successful track) • Includes both prob. of attempting & prob. of detecting given attempt • Heterogeneous/complementary sensors (radar: accurate range/range rate; EO accurate angles & angle rate • Complementary signature info. (RCSs vs. spectral intensities) • Orbit accuracy needs different sensors, different parts of orbit
Sensing Error => Covariances • Orbiting object described by 6 orbital parameters: • Eccentricity, Semimajor Axis, Inclination, Longitude of ascending node, Argument of periapsis, and Mean anomaly at epoch • Or by 3-D position and 3-D velocity vectors • Radar systems provide • accurate range and range rate measurements (2 #s) • Less accurate angle & angular rate (4 #s w/ relatively high error) • Optical sensors provide • good angle (2 parameters) and angular rate (2 parameters) • but no range or range rate (2 parameters missing). • For each sensing opportunity of an object from a sensor: • based on geometry & sensor accuracies: 6 x 6 covariance matrix • the variances and covariances of the errors in measurement • describes the probable volume of space
Combining Measurements/Covs • C1 & C2 are covariances (volumes) from 2 measurements • C3 is result of • combining them • C3 = C1*(C1 + C2)-1*C2
2 Examples, Complementary & Not • Volumes intersect near • orthogonally • Volumes intersect with narrow angle
Current SSN Scheduling Problems • Summary: Current Tasker implements policies dictated for it • Local scheduling done with no global info. • Must be suboptimal (can’t consider bottlenecks or other sensor data being collected) • Priority based local scheduling (IS suboptimal) • Executing all scheduled tasks likely implies undertasked • Possible to get sensor’s other mission’s detailed tasking? • No automated real-time response • Human response required – no automated feedback loop • Number of objects increasing (new sensors / smaller object resolution)
Scheduling 101: 1 Slide! • Scheduling with resource assignment is NP Complete (next slide) • Takes exponential time to guarantee an optimal solution • (4 options per each choice)1000 Decisions • 41000 = 22000 = 10200 >> 1080 = # particles in the universe • Much scheduling research is in Job Shop Domain • Choice of resource doesn't effect start time: not applicable for satellites • Constraint Satisfaction Problem: Search for Solution • Search Problem: Genetic Algorithms, Simulated Annealing, A*, Heuristic Search, Iterative Repair • Operations Research: Linear Programming, Branch and Bound, Hill-Climbing, Usually these must oversimplify the problem • Use multiple algorithms and pick the best schedule • Common Bad Algorithm: Priority Order, Greedily Pick Resource • Other ways to guarantee high priority tasks, e.g. swap out lower Priority • Nearly Linear Algorithms (Global Info.) vs Search
VERY Simple NP Completeness eg • 3 Remaining Tracks: Track 1, Track 2, Track 3 • Track 1 highest priority, Track 3 lowest • 2 Sensors: A (1 track capacity left), B (2 tracks left) • A best for Track 1, also applicable to Track 3 • B Applicable to Tracks 1 & 2 • Priority-based allocation poor: • Track 1 <- A, Track 2 <-B, Track 3 <- ? • # of solutions: 2 (Track 1) x 1 (T2) x 1 (T3) = 2 • But, 30 tracks, 4 choices each: • 4x4x4x…x4 = 430 >million trillion solutions • Avoid simple linear & systematic (exponential) algs • Avoid “greedy” decisions made without global context • NP Problems: solutions hard to find, easy to verify
Schedule Issue: • Resource Contention (Bottlenecks): • Scheduling flexible, high priority activity on a specific resource at a specific time, when other (probably less desirable) options are available when a lower priority activity absolutely needed it. • Both could have been scheduled but only one is • Need to consider resource side (not just task) • Need global (schedule difficulty, resource contention) information when making local decisions • Precalculate most contended-for resources (Global Info.) • Process most constrained requests first • Swap out lower priority tracks, if necessary • Global Info also includes complementary data needs for most accurate orbit metrics
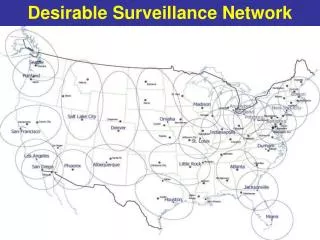
SSN Track and Search Scheduling • Simple priority-based schemes will significantly underutilize resources (including information-gain-based schemes) • LEO objects – highly constrained to specific sensors at very specific times (10 – 15 minute windows) • GEO objects – specific sensors, any time • MEO & non-GEO DS objects – loosely constrained in both • Highly Elliptical Orbit (HEO) – A mix of all 3 • Complex requests: • Min/Preferred tracks/day • Min/Max time or orbits between tracks • Mix of resources (e.g. 2 optical, 3 radar /day) • Precalculate most contended-for resources • Process most constrained requests first • Swap out lower priority tracks, if necessary
LEO Frequent Revisit Scheduler • Current Problem • Currently LEO FR: all-pass codes (“Every sensor, every pass”) • Duplicative and wasteful • Multiple sensors engaged over continental US, very little time separation/benefit • Small debris sensors (SDS) (SHY, EGL, CAV) waste time/energy on these • Need to reduce drain on SDSs & improve overall efficiency • For each object, apply all-pass code tasking only to those sensors needed to meet a certain stated revisit time, but not assigning every sensor to every object • Solution: AI-based scheduler to meet revisit times & schedule small debris tracking
DS Frequent Revisit Scheduler • Different situation from LEO • No fixed definition of “pass” • More interest in frequent revisit for this regime • Sensor set more flexible • Ground vs space-based optimization needed • More elaborate and potentially satisfactory solutions possible • Solution: AI-based scheduler to revisit appropriately • Need to use predicted tracks from surveillance tasks • Consider sunlight on sensors and objects • Allocate tracks appropriately to ground radar & ground and space-based optical sensors
GIG-Enabled Global Optimizing Scheduler • Schedule all objects’ tracking (LEO and DS) • Use all sensors (new, surveillance/untasked, collateral, contributing) • Quality Metric for DS: Covariance statistics • Quality Metric for LEO: number of tracks per object per day(empirically linked to accuracy) • Other Metrics: meeting revisit times, tracks lost, missed detections, redundant tracks, searches conducted, sensor utilization, SOI data gathered, etc. • Solution: AI-based scheduler, Bottleneck avoidance, FOV scheduling • Combination of 4 subschedulers (DS/NE, FR/not)
Family of 4 SSN Schedulers • Global, optimizing scheduler composed of 4 subschedulers • Deep Space Frequent Revisit Scheduler • Low Earth Orbit Frequent Revisit Scheduler • Deep Space Non-FR Scheduler • Low Earth Non-FR Scheduler • All have in Common: • Use of AI Architecture • LOS constraint between satellite and sensor • Optimize a Metric (Covariance, # of tracks, time between tracks) • Large # of satellites (100s to 1000s) • Bottleneck Avoidance (massive overlapping version) • Set of satellites / “free” tracks / set of resources
Multiple Subschedulers • Generating a schedule much more difficult than grading one • Architecture makes development of different algorithms quick • Need different algorithms for different problem spaces • Different amounts of time available • Call best scheduler for problem space & time available • Call multiple subschedulers, grade results, return best
Conclusions • SSN Scheduling is difficult, complex, and hampered by antiquated hardware • Essentially 4 different problems need 4 different but integrated solutions • DS FR Scheduler: intelligently use of sun/EO/radar/space-based-EO • DS NonFR Scheduler should utilize complementary observations to minimize orbit covariances • NE FR Scheduler; “shield” SDSs, and more efficiently use other sensors while meeting FR reqs • NE non-FR scheduler: maximize # of observations for each object • All need to use predicted tracks from non-taskable sensors • Use general AI architecture to rapidly create needed subschedulers • Can set priorities/observation #s to “schedule” unschedulable sensors to nearest 90 minute period
FOV Scheduling • With sensors that can track more than one object and move their field of FOV, need to schedule the sensor’s aimpoint • To maximize the number of tracks • Very hard problem: FOV pointing adds 2 continuous dimensions • Calculate and consider sets of aimpoints that can track multiple objects each