Download
1 / 43
430 likes | 533 Views
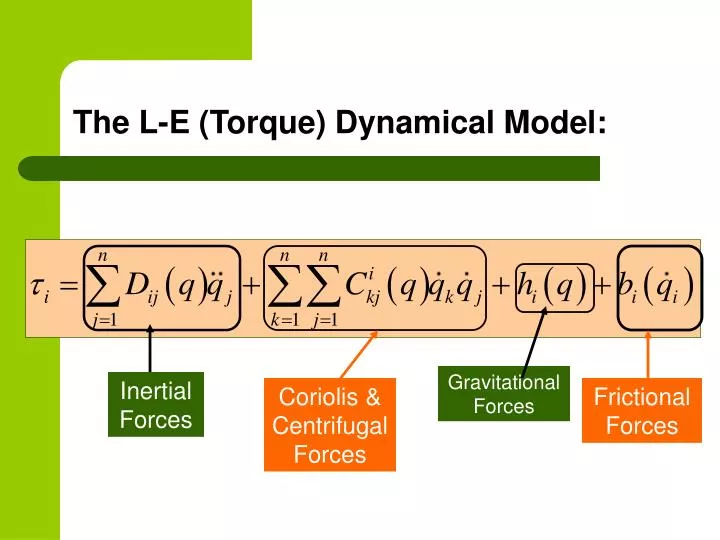
The L-E (Torque) Dynamical Model:. Gravitational Forces. Inertial Forces. Coriolis & Centrifugal Forces. Frictional Forces. Lets Apply the Technique -- . Lets do it for a 2-Link “Manipulator”. Link 1 has a Mass of m1; Link 2 a mass of m2. Before Starting lets define an L-E Algorithm:.

E N D
The L-E (Torque) Dynamical Model: Gravitational Forces Inertial Forces Coriolis & Centrifugal Forces Frictional Forces
Lets Apply the Technique -- Lets do it for a 2-Link “Manipulator” Link 1 has a Mass of m1; Link 2 a mass of m2
We Start with Ai’s Not Exactly D-H Legal (unless there is more to the robot than these 2 links!)
So Lets find T02 • T02 = A1*A2
I’ll Compute Similar Terms back – to – back rather than by the Algorithm
Finding Di • Considers each link a thin cylindrical bar • These are Inertial Tensors with respect to a Fc aligned with the link Framesi at the Cm
Finishing J1 Note the 2nd column is all zeros – even though Joint 2 is revolute – this is the special case!
Developing the D(q) Contributions • D(q)I = (Ai)TmiAi + (Bi)TDiBi • Ai is the “Upper half” of the Ji matrix • Bi is the “Lower Half” of the Ji matrix • Di is the Inertial Tensor of Linki defined in the Base space
Building D1 • D(q)1 = (A1)Tm1A1 + (B1)TD1B1 • Here:
Looking at the 2nd Term (Angular Velocity term) • Recall that D1 is: • Then:
Putting the 2 terms together, D(q)1 is: 2x2 because it is a 2-jointed robot!!
Building the Full Manipulator D(q) • D(q)2 = D(q)1 +(A2)Tm2A2 + (B2)TD2B2 • Recalling (from J2):
Building the ‘2nd’ Term (the Linear Vel. part from the second link):
Building the 3rd Term: • Recall D2: • Then:
Combining the 3 Terms to construct the Full D(q) Manipulator Inertial Tensor “Solution”: 2x2 because it is 2 Joints (still)!
Simplifying then, the Manipulator inertial Tensor D(q) is: NOTE: D(q)man is Square in number of Joints! 2x2 here because this is a 2-jointed robot!!
This Completes the Fundamental Steps: • Now we compute the Velocity Coupling Matrix and Gravitation terms:
Plugging ‘n Chugging (1st link) • From Earlier:
Finding h1: • Given: gravity vector points in –Y0 direction • gk =(0, -g0, 0)T • g0 is gravitational constant • In the h model Akij is extracted from the relevant Jacobian matrix • Here: 3-directions of Cartesian base space! Here, i=1
Continuing (i =1): From Jacobianj Upper half – specified components Gravitational effect: Would be 3 terms (BUT) only K = 2 survives since gravitational vector points in –Y0 direction
Computing h2 Would be 3 terms (BUT) only K = 2 survives as gravitational vector points in –Y0 direction
Building “Torque” Models for each Link • In General:
For Link 1 (i=1): • The 1st terms: • 2nd Terms:
Initial Link 2 terms: • !st Terms: • 2nd Terms: