Download
1 / 25
250 likes | 378 Views
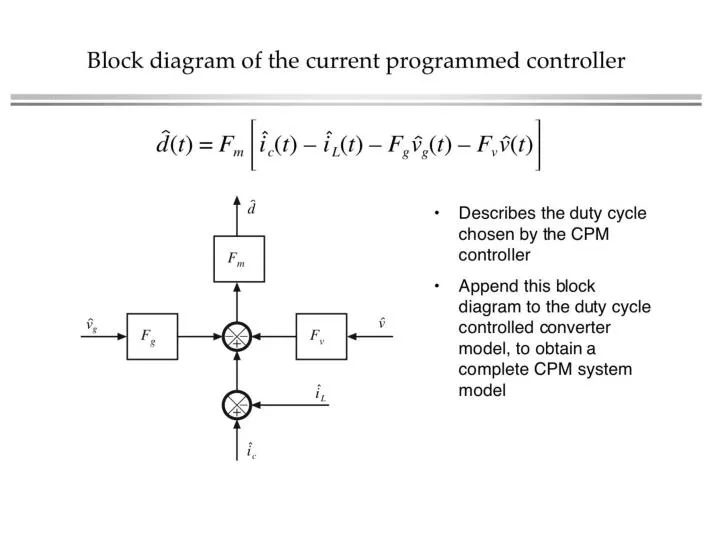
(Tan). High-frequency pole (from the Tan averaged model (4)). Discrete-time dynamics:. Difference equation:. Z -transform:. Discrete-time ( z -domain) control-to-inductor current transfer function:. Pole at z = a Stability condition: pole inside the unit circle, | a | < 1

E N D
Discrete-time dynamics: Difference equation: Z-transform: Discrete-time (z-domain) control-to-inductor current transfer function: • Pole at z = a • Stability condition: pole inside the unit circle, |a| < 1 • Frequency response (note that z-1 corresponds to a delay of Ts in time domain):
Equivalent hold: ic + ic -ma(t) ic[n] iL[n] iL[n-1] d[n]Ts -m2 m1 iL(t) iL[n] Ts
Equivalent hold • The response from the samples iL[n] of the inductor current to the inductor current perturbation iL(t) is a pulse of amplitude iL[n] and length Ts • Hence, in frequency domain, the equivalent hold has the transfer function previously derived for the zero-order hold:
Complete sampled-data “transfer function” Control-to-inductor current small-signal response:
Example • CPM buck converter: Vg = 10V, L = 5 mH, C = 75 mF, D = 0.5, V = 5 V, I = 20 A, R = V/I = 0.25 W, fs = 100 kHz • Inductor current slopes: m1 = (Vg – V)/L = 1 A/ms m2 = V/L = 1 A/ms D = 0.5: CPM controller is stable for any compensation ramp, ma/m2 > 0
Control-to-inductor current responses for several compensation ramps (ma/m2 is a parameter) ma/m2=0.1 ma/m2=0.5 ma/m2=1 ma/m2=5 MATLAB file: CPMfr.m 0.1 0.5 1 5
First-order approximation Control-to-inductor current response behaves approximately as a single-pole transfer function with a high-frequency pole at Same prediction as HF pole in basic model (4) (Tan)
Control-to-inductor current responses for several compensation ramps (ma/m2 = 0.1, 0.5, 1, 5) 1st-order transfer-function approximation
Second-order approximation Control-to-inductor current response behaves approximately as a second-order transfer function with corner frequency fs/2 and Q-factor given by
Control-to-inductor current responses for several compensation ramps (ma/m2 = 0.1, 0.5, 1, 5) 2nd-order transfer-function approximation
Example • CPM buck converter: Vg = 10V, L = 5 mH, C = 75 mF, D = 0.5, V = 5 V, I = 20 A, R = V/I = 0.25 W, fs = 100 kHz • Inductor current slopes: m1 = (Vg – V)/L = 1 A/ms m2 = V/L = 1 A/ms D = 0.5: CPM controller is stable for any compensation ramp, ma/m2 > 0 Select:ma/m2 = Ma/M2 = 1, Ma = 1 A/ms
Example (cont.) Duty-cycle control Peak current-mode control (CPM)
Compare to first-order approximation of the high-frequency sampled-data control-to-current model Control-to-inductor current response behaves approximately as a single-pole transfer function with a high-frequency pole at