Download
1 / 33
330 likes | 427 Views
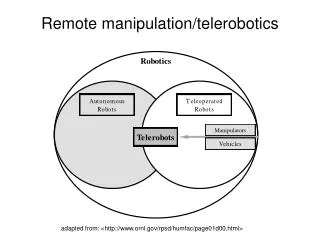
Supporting Remote Manipulation with an Ecological Augmented Virtuality Interface. J. Alan Atherton Michael Goodrich Brigham Young University Department of Computer Science April 9, 2009 Funded in part by Idaho National Laboratory And Army Research Laboratory. Outline. Background

E N D
Supporting Remote Manipulation with an Ecological Augmented Virtuality Interface J. Alan Atherton Michael Goodrich Brigham Young University Department of Computer Science April 9, 2009 Funded in part by Idaho National Laboratory And Army Research Laboratory
Outline Background Related Work Ecological Interface User Study Interface Changes from Study Conclusions and Future Work
Background • What is a remote manipulator? • Applications • USAR • EOD • Planetary Exploration
Problem Foster-Miller Talon • Remotely operating a robot is difficult • “Soda straw” — Maintaining situation awareness • Time delay • Mental workload • Why is this a problem? • Collisions • Slow • Stressful
Older Interfaces All images adopted fromYanco, H. A.; Drury, J. L. & Scholtz, J.“Beyond usability evaluation: analysis of human-robot interaction at a major robotics competition”Hum.-Comput. Interact., L. Erlbaum Associates Inc., 2004, 19, 117-149
Outline Background Related Work Ecological Interface User Study Interface Changes from Study Conclusions and Future Work
Related Work Idaho National Laboratory UMass Lowell Bruemmer, D. J. et al.“Shared understanding for collaborative control.”IEEE Transactions on Systems, Man and Cybernetics, Part A, 2005, 35, 494-504 Yanco, H. A. et al.“Analysis of Human-Robot Interaction for Urban Search and Rescue.”Proceedings of the IEEE International Workshop on Safety, Security and Rescue Robotics, 2006
Related Work Ferland et al. - Sherbrooke INL / BYU AV Interface Ferland, F.; Pomerleau, F.; Dinh, C. T. L. & Michaud, F.“Egocentric and exocentric teleoperation interface using real-time, 3D video projection.”Proceedings of the 4th ACM/IEEE international conference on Human robot interaction, ACM, 2009, 37-44 C. W. Nielsen, M. A. Goodrich, and B. Ricks. “Ecological Interfaces for Improving Mobile Robot Teleoperation.” IEEE Transactions on Robotics and Automation. Vol 23, No 5, pp. 927-941, October 2007.
Related Work NASA Viz CMU Robotics Institute Nguyen, L. A.; Bualat, M.; Edwards, L. J.; Flueckiger, L.; Neveu, C.; Schwehr, K. ..; Wagner, M. D. & Zbinden, E.“Virtual Reality Interfaces for visualization and control of remote vehicles”Autonomous Robots, 2001, 11, 59-68 Kelly, A.; Anderson, D.; Capstick, E.; Herman, H. & Rander, P.“PhotogeometricSensing for Mobile Robot Control and VisualisationTasks”Proceedings of the AISB Symposium on New Frontiers in Human-Robot Interaction, 2009
Outline Background Related Work Ecological Interface User Study Interface Changes from Study Conclusions and Future Work
Interface Design • Requirements • Ecological • Increase situation awareness • Manage workload • Existing Interfaces • Lack depth information • No manipulation support • Not designed for real-time operation
Ecological Augmented Virtuality Interface • Real-time remote manipulation
Infrastructure Robot Controller User Interface • Robot • Build from kit, modify • Player driver • Motion planning for arm • Swiss Ranger driver • Communication • Integrate with INL’s system • Network data transfer • User Interface • OpenGL display • Experiment automation
Outline Background Related Work Ecological Interface User Study Interface Changes from Study Conclusions and Future Work
Experiment Setup • Task: collect yellow blocks • 30 participants • Between-subject comparison Visualization 3D + Video 3D Video End Effector Robot Control Joint
Reconfiguration Reduce memorization effects Minimize damage to arm Quick change
Robot Control Joint control View-dependent end effector control
Robot View-Dependent Control • Robot reaches for point • User moves point with joystick • Point movement depends on view orientation
Results – Time 3D + Vid. End eff. 3D + Vid. Joint 3D End eff. 3D Joint Video End eff. Video Joint
Results – Collisions 3D + Vid. End eff. 3D + Vid. End eff. 3D + Vid. Joint 3D + Vid. Joint 3D End eff. 3D End eff. 3D Joint 3D Joint Video End eff. Video End eff. Video Joint Video Joint Collisions with posts, box, table Collisions with block in final adjustments
Outline Background Related Work Ecological Interface User Study Interface Changes from Study Conclusions and Future Work
Changes Inspired by User Study • Problems • Alignment • Time lag • Cluttered 3D scan model • Changes • Stereo camera exterior orientation • Interactive robot arm calibration • Simple Quickening • Scan Pruning
Camera and Robot Calibration Interactive stereo camera calibration Live robot arm calibration
Outline Background Related Work Ecological Interface User Study Interface Changes from Study Conclusions and Future Work
Conclusions • 3D visualization supports SA • Video is faster • 3D + video is a good tradeoff • 3D + video might reduce workload
Future Work • Head tracking • Ecological camera video • Haptics