Download
1 / 19
190 likes | 196 Views
Evolving Cutting Horse and Sheepdog Behavior on a Simulated Flock. Chris Beacham. Abstract.

E N D
Evolving Cutting Horse and Sheepdog Behavior on a Simulated Flock Chris Beacham
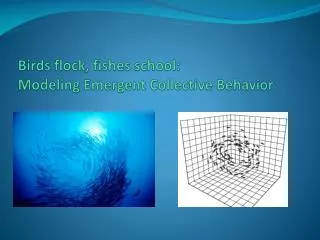
Abstract • The focus of this project is attempting to evolve the behavior of a single agent or small group of agents so that they can effectively direct the movement of a much larger group which displays flocking behavior. This is the same role sheepdogs play to manage herds of livestock.
Other Research • There has been little development in this specific field. • Flocking algorithm is well established, but is hard to direct. • Robotic Sheepdog Project: Proof of Concept for robotic handling of livestock
Uses • Two main Applications: Animation – Control direction of flocks in animations, currently no good method exists Livestock Herding: Could be used in a robotic agent to actually herd livestock. Could reduce livestock stress.
Programming Tools • Python is being used for the code, with tKinter providing the graphics. • Breve was looked at as a possibility, but it was dismissed for being to complex and not documented.
Precursors • Initially, an evolution program was written to fine tune the authors understanding of artificial evolution. • This is a genepool of evolved creatures using user selection
Sheepdog and Cutting Horse • The sheepdog directs the movements of sheep, ducks, cows, goats and other herd stock. It accomplishes this by moving around the herd or flock in specific ways. • The cutting horse is used with herds of cattle. It’s job is to single out a single cow, and “cut” it off from the herd, thus allowing people to access it.
Flocking • The herd will be simulated with a flocking algorithm. • Three algorithms make up flocking behavior: • Separation • Cohesion • Alignment
First Quarter • The first quarter was spent creating a flocking behavior simulation, and debugging it. • This is a screenshot of a flock flying to the right.
Second Quarter • Herding behavior established. Same algorithm as flocking.
Second Quarter • Herd reacting to ‘predator’ • Sheepdog agent very simple at this point
Second Quarter • Which behavior determination system to use? • Neural Networks v. Cellular Automaton v. Weighting • Pros and Cons for all options
Second Quarter • Weighting method chosen as best behavior determination system. • Genetic code adds weight to different variables. • Pros • Many strategies can be produced • Should be reproducible in other situations • Cons • Nowhere near the possibilities for innovation of neural nets.
Second Quarter • First generation sheepdog behavior is randomly generated. Movement is very chaotic.
First Generation [32.164006627541823, -19.261148559544093, 28.838154710926517, -2.6177442818239252, -1.610540774960918, -3.0347756036751052, -20.931229810205998, 5.7627079638362986, 1.7473837471501998, 7.7198793790136833], [-11.470881676551826, 28.336696618106188, 38.987209868269673, 2.4890967130213557, -0.078896899902183293, 4.0279192032567082, 38.113753797435876, -9.9091943197785568, 6.0767013600522422, 22.90210747684651], [19.524480722525141, 17.865021602410764, 35.768937982290353, 2.5848421326612847, 1.7679235149952088, 1.780983430333368, 35.344660445143845, 8.9854097668224071, 0.58138734205464693, 19.580526983833721], [14.652628528856667, 37.731823468942835, 16.911577862190441, 0.4858339804315932, 4.2518008367774591, -4.8959446134369822, -12.527178547904271, -23.834582722704489, 2.5735304563845185, 10.983380384038441], [-37.365308224600689, -26.219646166636444, 23.837388022611961, -2.6502990318154742, 2.5285789988460721, -1.9174224730964582, -4.8617111048341215, -27.040194863370225, 5.3442590210258247, 47.707995016754595], [-47.83280830026532, -27.746753711795826, -22.465210886399479, -1.8834401853055285, -4.6526740112824712, 2.1138389668398263, 4.7442060317506503, 13.681368603073729, 1.7036710633058849, -24.335868677880825], [31.332197286921499, 37.788533831872257, -45.919434849424789, 0.48534266655833669, -3.3026128229853424, -1.7377195224251816, 7.2576919556413912, -36.199633586541836, 4.8382490300740457, 4.0074023699981822], [3.2210497987682132, 10.765683943559381, -24.469857259276651, -1.9355065069590394, -0.61633090971086801, -3.1878785380980879, 41.904929197287117, 3.5243513927757348, 5.4548537085994404, 12.247444295078616], • This is a sample of the genetic pool of the first generation.
Third Quarter • Breeding program and Automated testing program produced. • Breeding program designed for very heavy selection pressure • Agents evaluated on how close they get the flock to the goal.
Third Quarter • Several strategies predominate • “Bubble” strategy • “Slow” strategy • “Southeast” strategy • “Spinning wheel” strategy • “Wall-bounce” strategy – suspect disconnect between graphical output and nongraphical output
Are any Strategies Viable? • Two applications: Animations and Livestock • Livestock – Possible, but unknown. Real experience needed. • Animation – depends on application. Some strategies significantly distort flock shape
Continued Development • Expected to continue over the summer • Three main goals • Simulated flock to reflect real flock movement • More vectors in weighing system • Modification of breeding algorithm for more biodiversity • Also, simulation is computationally intensive, so need to secure a location to run it long-term.