Download
1 / 24
240 likes | 425 Views
Chapter 12 Equilibrium and elasticity. Equilibrium We already introduced the concept of equilibrium in Chapter 8: dU ( x ) /dx = 0 More general definition of equilibrium: Static equilibrium :

E N D
Chapter 12 Equilibrium and elasticity
Equilibrium • We already introduced the concept of equilibrium in Chapter 8: dU(x)/dx = 0 • More general definition of equilibrium: • Static equilibrium: • Stable equilibrium: the body returns to the state of static equilibrium after having been displaced from that state. Unstable equilibrium: the state of equilibrium is lost after a small force displaces the body
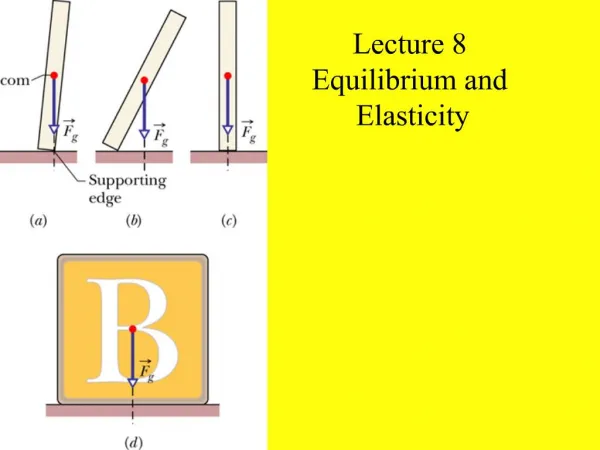
Center of mass: stable equilibrium • We consider the torque created by the gravity force (applied to the CM) and its direction relative to the possible point(s) of rotation
Center of mass: stable equilibrium • We consider the torque created by the gravity force (applied to the CM) and its direction relative to the possible point(s) of rotation
Center of mass: stable equilibrium • We consider the torque created by the gravity force (applied to the CM) and its direction relative to the possible point(s) of rotation
Center of mass: stable equilibrium • We consider the torque created by the gravity force (applied to the CM) and its direction relative to the possible point(s) of rotation
Center of gravity • Gravitational force on a body effectively acts on a single point, called the center of gravity • If g is the same for all elements of a body (which is not always so: see for example Chapter 13) then the center of gravity of the body coincides with its center of mass
The requirements of equilibrium • For an object to be in equilibrium, we should have two requirements met • Balance of forces: the vector sum of all the external forces that act on the body is zero • Balance of torques: the vector sum of all the external torques that act on the body, measured about any possible point, is zero
Equilibrium: 2D case • If an object can move only in 2D (xy plane) then the equilibrium requirements are simplified: • Balance of forces: only the x- and y-components are considered • Balance of torques: only the z-component is considered (the only one perpendicular to the xy plane)
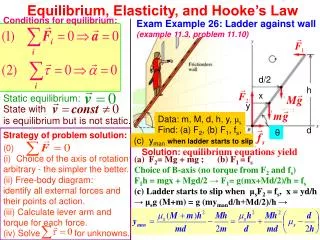
Chapter 12 Problem 19 One end of a uniform 4.00-m-Iong rod of weight Fg is supported by a cable. The other end rests against the wall, where it is held by friction. The coefficient of static friction between the wall and the rod is μs = 0.500. Determine the minimum distance x from point A at which an additional object, also with the same weight Fg can be hung without causing the rod to slip at point A.
Chapter 12 Problem 43 A 10 000-N shark is supported by a cable attached to a 4.00 m rod that can pivot at the base. Calculate the tension in the tie rope between the rod and the wall, assuming the tie rope is holding the system in the position shown. Find the horizontal and vertical forces exerted on the base of the rod. Ignore the weight of the rod.
Indeterminate structures • Indeterminate systems cannot be solved by a simple application of the equilibrium conditions • In reality, physical objects are • not absolutely rigid bodies • Concept of elasticity is employed
Elasticity • All real “rigid” bodies can change their dimensions as a result of pulling, pushing, twisting, or compression • This is due to the behavior of a microscopic structure of the materials they are made of • Atomic lattices can be approximated as sphere/spring repetitive arrangements
Stress and strain • All deformations result from a stress – deforming force per unit area • Deformations are described by a strain – unit deformation • Coefficient of proportionality between stress and strain is called a modulus of elasticity • stress = modulus * strain
Thomas Young (1773 – 1829) • Tension and compression • Strain is a dimensionless ratio – fractional change in length of the specimen ΔL/Li • The modulus for tensile and compressive strength is called the Young’s modulus
Tension and compression • Strain is a dimensionless ratio – fractional change in length of the specimen ΔL/Li • The modulus for tensile and compressive strength is called the Young’s modulus
Shearing • For the stress, force vector lies in the plane of the area • Strain is a dimensionless ratio Δx/h • The modulus for this case is called the shear modulus
Hydraulic stress • The stress is fluid pressure p = F/A (Ch.14) • Strain is a dimensionless ratio ΔV/V • The modulus is called the bulk modulus
Answers to the even-numbered problems Chapter 12 Problem 8: (a) 9.00 g (b) 52.5 g (c) 49.0 g
Answers to the even-numbered problems Chapter 12 Problem 22: 1.0 × 1011 N/m2
Answers to the even-numbered problems Chapter 12 Problem 28: 9.85 × 10−5