Download
1 / 1
10 likes | 207 Views
Human-Robot Interaction Neck Motion. Heriberto De La Cruz, Professor – Dr. Dan Popa , Advisor - Nahum Torres Department of Electrical Engineering, The University of Texas at Arlington, Arlington, Texas 76019. Research Experiences for Undergraduates in Sensors and Applications.

E N D
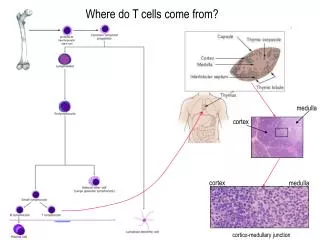
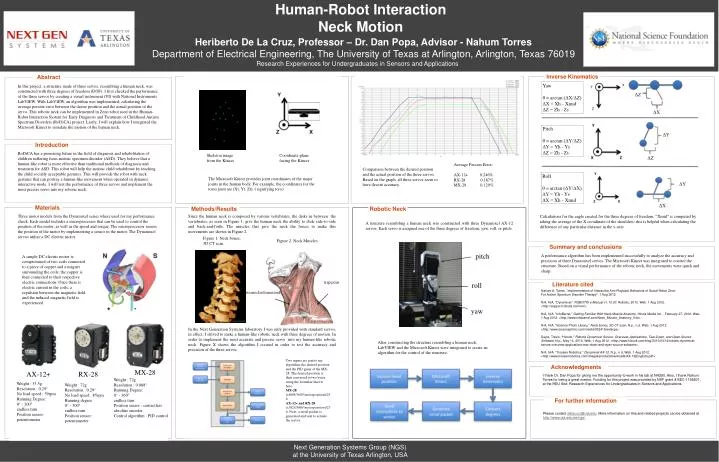
Human-Robot Interaction Neck Motion Heriberto De La Cruz, Professor – Dr. Dan Popa, Advisor - Nahum Torres Department of Electrical Engineering, The University of Texas at Arlington, Arlington, Texas 76019 Research Experiences for Undergraduates in Sensors and Applications Inverse Kinematics Abstract In this project, a structure made of three servos, resembling a human neck, was constructed with three degrees of freedom (DOF). I first checked the performance of the three servos by creating a visual instrument (VI) with National Instruments LabVIEW. With LabVIEW, an algorithm was implemented; calculating the average percent error between the desire position and the actual position of the servo. This robotic neck can be implemented in Zeno robot used in the Human-Robot Interaction System for Early Diagnosis and Treatment of Childhood Autism Spectrum Disorders (RoDiCA) project. Lastly, I will explain how I integrated the Microsoft Kinect to simulate the motion of the human neck. Yaw θ = arctan (ΔX/ΔZ) ΔX = Xh - Xmid ΔZ = Zh - Zs ΔZ ΔX Pitch θ = arctan (ΔY/ΔZ) ΔY = Yh- Ys ΔZ = Zh - Zs Introduction RoDiCA has a promising future in the field of diagnosis and rehabilitation of children suffering from autistic spectrum disorder (ASD). They believe that a human-like robot is more effective than traditional methods of diagnosis and treatment for ASD. This robot will help the autistic child rehabilitate by teaching the child socially acceptable gestures. This will provide the robot with neck gestures that can portray a human-like movement when operated in dynamic interactive mode. I will test the performance of three servos and implement the most precise servo into my robotic neck. Skeleton image from the Kinect Coordinate plane facing the Kinect Average Percent Error: AX-12+ 0.246% RX-28 0.167% MX-28 0.129% Comparison between the desired position and the actual position of the three servos. Based on the graph, all three servos seem to have decent accuracy. Roll θ = arctan (ΔY/ΔX) ΔY = Yh - Ys ΔX = Xh - Xmid The Microsoft Kinect provides joint coordinates of the major joints in the human body. For example, the coordinates for the torso joint are (Xt, Yt, Zt), t signifying torso. ΔY ΔX Materials Robotic Neck Methods/Results Since the human neck is composed by various vertebrates, the disks in between the vertebrates, as seen in Figure 1, give the human neck the ability to slide side-to-side and back-and-forth. The muscles that give the neck the forces to make this movements are shown in Figure 2. In the Next Generation Systems laboratory I was only provided with standard servos, in effect, I strived to make a human-like robotic neck with three degrees of motion. In order to implement the most accurate and precise servo into my human-like robotic neck. Figure X shows the algorithm I created in order to test the accuracy and precision of the three servos. Three motor models from the Dynamixelseries where used for my performance check. Each model includes a microprocessor that can be used to control the position of the motor, as well as the speed and torque. The microprocessor senses the position of the motor by implementing a sensor in the motor. The Dynamixel servos utilize a DC electric motor. A structure resembling a human neck was constructed with three Dynamixel AX-12 servos. Each servo is assigned one of the three degrees of freedom; yaw, roll, or pitch. Calculations for the angle created for the three degrees of freedom. “Xmid” is computed by taking the average of the X coordinate of the shoulders; this is helpful when calculating the difference of any particular distance in the x-axis. Figure 1. Neck bones, 3D CT scan Figure 2. Neck Muscles Summary and conclusions A performance algorithm has been implemented successfully to analyze the accuracy and precision of three Dynamixel servos. The Microsoft Kinect was integrated to control the structure. Based on a visual performance of the robotic neck, the movements were quick and sharp. A simple DC electric motor is compromised of two coils connected to a piece of copper and a magnet surrounding the coils; the copper is then connected to their respective electric connections. Once there is electric current in the coils, a repulsion between the magnetic field and the induced magnetic field is experienced. pitch trapezius roll Literature cited Nahum A. Torres. “Implementation of Interactive Arm Playback Behaviors of Social Robot Zeno For Autism Spectrum Disorder Therapy”. 1 Aug 2012. N/A, N/A. "Dynamixel." ROBOTIS e-Manual v1.10.00. Robotis, 2010. Web. 1 Aug 2012. <http://support.robotis.com/en/>. N/A, N/A. "InfoBarrel." Getting Familiar With Neck Muscle Anatomy. Hinzie Media Inc. , February 27, 2012. Web. 1 Aug 2012. <http://www.infobarrel.com/Neck_Muscle_Anatomy_Info>. N/A, N/A. "Science Photo Library." Neck bones, 3D CT scan. N.p., n.d. Web. 1 Aug 2012. <http://www.sciencephoto.com/media/302415/enlarge>. Deyle, Travis. "Hizook." Robotis Dynamixel Servos: Overview, Applications, Tear-Down, and Open-Source Software. N.p., May 14, 2010. Web. 1 Aug 2012. <http://www.hizook.com/blog/2010/03/14/robotis-dynamixel-servos-overview-applications-tear-down-and-open-source-software>. N/A, N/A. "Trossen Robotics." Dynamixel AX-12. N.p., n.d. Web. 1 Aug 2012. <http://www.trossenrobotics.com/images/productdownloads/AX-12(English).pdf>. sternocleidomastoid yaw ΔY After constructing the structure resembling a human neck, LabVIEW and the Microsoft Kinect were integrated to create an algorithm for the control of the structure. Two inputs are sent to my algorithm; the desired position and the PID gains of the MX-28. The desired position is then converted to two bytes using the formulas shown here: MX-28 ((4095/360)*motorposition)/256 AX-12+ and RX-28 ((1023/300)*motorposition)/256. Next, a serial packet is generated and sent to actuate the servos. ΔZ Acknowledgments I thank Dr. Dan Popa for giving me the opportunity to work in his lab at NH250. Also, I thank Nahum Torres for being a great mentor. Funding for this project was provided by NSF grant # EEC-1156801, at the REU Site: Research Experiences for Undergraduates in Sensors and Applications. MX-28 AX-12+ RX-28 Weight : 72g Resolution : 0.088° Running Degree: 0° - 360° endless turn Position sensor : contactless absolute encoder Control algorithm : PID control Weight : 53.5g Resolution : 0.29° No load speed : 59rpm Running Degree: 0° - 300° endless turn Position sensor: potentiometer Weight : 72g Resolution : 0.29° No load speed : 85rpm Running degree 0° - 300° endless turn Position sensor: potentiometer For further information Please contact delacruz@uta.edu. More information on this and related projects can be obtained at http://www.uta.edu/ee/ngs/. Next Generation Systems Group (NGS) at the University of Texas Arlington, USA