Download
1 / 5
50 likes | 140 Views
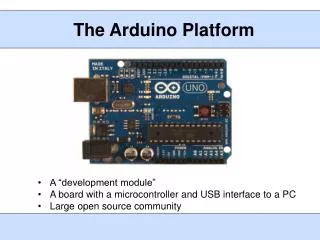
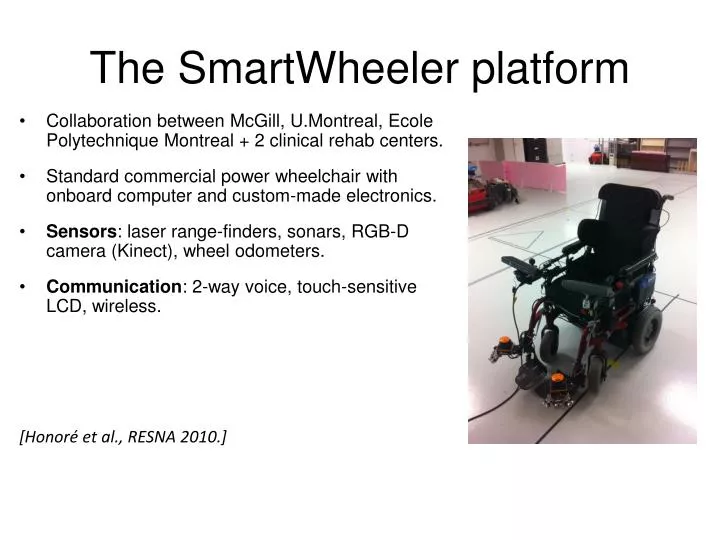
The SmartWheeler platform. Collaboration between McGill, U.Montreal , Ecole Polytechnique Montreal + 2 clinical rehab centers. Standard commercial power wheelchair with onboard computer and custom-made electronics.

E N D
The SmartWheeler platform • Collaboration between McGill, U.Montreal, EcolePolytechnique Montreal + 2 clinical rehab centers. • Standard commercial power wheelchair with onboard computer and custom-made electronics. • Sensors: laser range-finders, sonars, RGB-D camera (Kinect), wheel odometers. • Communication: 2-way voice, touch-sensitive LCD, wireless. [Honoré et al., RESNA 2010.]
Overall software architecture Two primary components of cognitive robotic system: Interaction Manager and Navigation Manager
Current system:classical mapping path planning Obstacle detection: Fusion of laser, sonar and RBG-D data to detect standard obstacles, including glass walls. Next challenge is to detect “negative” obstacles (holes, descending ramp) Mapping and localization: Particle filtering SLAM algorithms, using laser data, integrated in ROS. Local control: Pre-programmed behaviors for simple tasks (wall following, door traversal) Global path planning: Deterministic search algorithm to achieve point-to-point navigation in discretized statespace.
Ongoing research:Socially adaptive navigation Approach: - Extract information about dynamic obstacles from RBG-D camera. - Acquire training data containing trajectories of driving in crowds from a human expert. - Apply machine learning methods on the training data to learn a policy that matches dynamic features to control actions. [Kim and Pineau., RSS 2013.]
Speech-based user interaction Using a Partially Observable Markov Decision Process (POMDP) to model the dialogue interaction and select the robot response (right column). [Atrash et al., Int.J. Social Robotics. 2009.]