Download
1 / 1
10 likes | 87 Views
Evaluation Position. Statistical Angular Error-Based Triangluation for Efficient and Accurate Multi-View Scene Reconstruction. w ti. v i. Evaluation Position. x n. x 1. x 2. Shawn Recker 1 , Mauricio Hess-Flores 2 , and Kenneth I. Joy 3. C n. C 1. …. C 2.

E N D
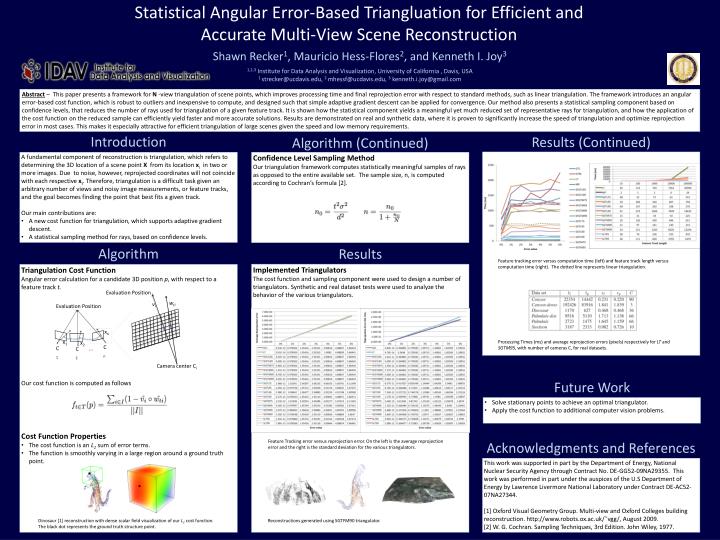
Evaluation Position Statistical Angular Error-Based Triangluation for Efficient and Accurate Multi-View Scene Reconstruction wti vi Evaluation Position xn x1 x2 Shawn Recker1, Mauricio Hess-Flores2, and Kenneth I. Joy3 Cn C1 … C2 1,2,3 Institute for Data Analysis and Visualization, University of California , Davis, USA 1 strecker@ucdavis.edu, 2 mhessf@ucdavis.edu, 3kenneth.i.joy@gmail.com Camera center Ci Abstract – This paper presents a framework for N -view triangulation of scene points, which improves processing time and final reprojection error with respect to standard methods, such as linear triangulation. The framework introduces an angular error-based cost function, which is robust to outliers and inexpensive to compute, and designed such that simple adaptive gradient descent can be applied for convergence. Our method also presents a statistical sampling component based on confidence levels, that reduces the number of rays used for triangulation of a given feature track. It is shown how the statistical component yields a meaningful yet much reduced set of representative rays for triangulation, and how the application of the cost function on the reduced sample can efficiently yield faster and more accurate solutions. Results are demonstrated on real and synthetic data, where it is proven to significantly increase the speed of triangulation and optimize reprojection error in most cases. This makes it especially attractive for efficient triangulation of large scenes given the speed and low memory requirements. Introduction Results (Continued) Algorithm (Continued) • A fundamental component of reconstruction is triangulation, which refers to determining the 3D location of a scene point X from its location xi in two or more images. Due to noise, however, reprojected coordinates will not coincide with each respective xi. Therefore, triangulation is a difficult task given an arbitrary number of views and noisy image measurements, or feature tracks, and the goal becomes finding the point that best fits a given track. • Our main contributions are: • Anew cost function for triangulation, which supports adaptive gradient descent. • A statistical sampling method for rays, based on confidence levels. Confidence Level Sampling Method Our triangulation framework computes statistically meaningful samples of rays as opposed to the entire available set. The sample size, n, is computed according to Cochran’s formula [2]. Algorithm Results Feature tracking error versus computation time (left) and feature track length versus computation time (right). The dotted line represents linear triangulation. Implemented Triangulators The cost function and sampling component were used to design a number of triangulators. Synthetic and real dataset tests were used to analyze the behavior of the various triangulators. • Triangulation Cost Function • Angular error calculation for a candidate 3D position p, with respect to a feature track t. • Our cost function is computed as follows • Cost Function Properties • The cost function is an L1 sum of error terms. • The function is smoothly varying in a large region around a ground truth point. Processing Times (ms) and average reprojection errors (pixels) respectively for LT and SGTM95, with number of cameras C, for real datasets. Future Work • Solve stationary points to achieve an optimal triangulator. • Apply the cost function to additional computer vision problems. Feature Tracking error versus reprojection error. On the left is the average reprojection error and the right is the standard deviation for the various triangulators. Acknowledgments and References This work was supported in part by the Department of Energy, National Nuclear Security Agency through Contract No. DE-GG52-09NA29355. This work was performed in part under the auspices of the U.S Department of Energy by Lawrence Livermore National Laboratory under Contract DE-AC52-07NA27344. [1] Oxford Visual Geometry Group. Multi-view and Oxford Colleges building reconstruction. http://www.robots.ox.ac.uk/˜vgg/, August 2009. [2] W. G. Cochran. Sampling Techniques, 3rd Edition. John Wiley, 1977. Dinosaur [1] reconstruction with dense scalar field visualization of our L1 cost function. The black dot represents the ground truth structure point. Reconstructions generated using SGTFM90 triangulator.